




GigaBrain-0开源:VLA模型突破10倍数据,真机碾压SOTA

国内首个基于世界模型生成数据的端到端VLA具身基础模型GigaBrain-0重磅面世。
近日,在武汉东湖高新区,极佳视界与湖北人形机器人创新中心达成战略签约,并联合发布了端到端VLA「具身基础模型」GigaBrain-0。
这是国内首次运用「世界模型」生成数据实现真机泛化的视觉-语言-动作基础模型,旨在以世界模型为核心,彻底改变通用机器人大脑的开发模式。
GigaBrain-0采用了当前最前沿的VLA模型架构,支持图像、点云、文本和本体状态的多模态输入,能够直接输出结构化的任务规划和运动轨迹。该模型依托海量数据进行预训练,可实现更精准的移动导航和复杂的长序列操作。
结合极佳视界自研的「世界模型平台GigaWorld」,构建了业界最完整的具身数据体系,可快速实现多种本体上的复杂机器人操作任务。后续GigaBrain-0将全面开源。
项目链接:https://gigabrain0.github.io/
论文链接:https://arxiv.org/pdf/2510.19430
01 核心架构升级
针对当前机器人操作精准度不足和推理能力较弱的问题,GigaBrain-0重点强化了3D空间感知能力和结构化推理能力。通过引入这两项关键能力,GigaBrain-0可实现更精准的移动导航和更复杂的长序列操作。这是全球首个通过「一脑多形」架构实现端到端全身控制的模型,能够一键完成衣物整理等需要柔性和长程移动的复杂操作任务。
1. 3D空间感知能力:融入深度信息输入,实现更精准的移动导航
GigaBrain-0通过引入深度信息输入,显著提升了物体3D位置和空间布局的感知能力,这对于实现精准的双臂操作和移动导航至关重要。
2. 结构化推理能力:实现更稳定的长程复杂任务表现
GigaBrain-0通过子目标拆解和机械臂末端轨迹输出,大幅提升了在开放场景中的任务规划能力。具体体现在:
子目标拆解:模型在推理过程中可同步输出子任务的自然语言描述,使GigaBrain-0对长程任务的分解更加合理。末端轨迹输出:模型在推理过程中增加了机械臂执行器运动路径在图像平面上的2D投影输出,增强了整体动作规划能力。
02 全球首个世界模型驱动的数据体系
世界模型无论在数据侧还是模型侧,对具身智能发展都具有关键价值。极佳视界以「世界模型」为核心,打造了全球首个最完整的具身智能数据体系,具体包括:
Sim2Real迁移数据:利用Isaac Sim等仿真环境合成多样化的机器人操作数据,通过GigaWorld的Sim2Real变换,实现逼真的外观渲染,同时保持原始场景几何和动作语义。
Real2Real迁移数据:将真实世界采集的视频数据,通过文本提示控制前景和背景的材质、纹理、光照条件,同时保持机器人动作和交互的一致性,有效将真实数据的多样性提升约10倍。
视角转换数据:利用GigaWorld的3D空间场景重建能力,将单个真实数据片段生成新视角的数据片段。
视频生成数据:GigaWorld可根据单张输入图像和不同的文本提示,生成多样化的具身机器人操作视频,并通过逆动力学模型推演出相应的机器人动作序列,合成训练数据。
Human迁移数据:通过视频变换和运动学重定向,将大规模第一人称视频中的人手替换为机械臂,生成稳定且可由机器人执行的动作序列。
03 高效的跨本体适配能力
极佳视界联合湖北人形机器人创新中心,共同完成了大规模预训练数据的采集。数据覆盖了工业、商业、办公、家居、实验室等5大类场景,细分为超市、酒店大堂、咖啡店、奶茶店、便利店、餐厅、仓库搬运、工业流水线、茶水间、住宅、公寓家居、会议室、办公室工位、实验室等14个具体场景。
结合场景丰富的预训练数据和先进的模型架构,GigaBrain-0具备了优秀的任务规划能力。借助极佳视界的「世界模型平台」,可在不同本体上快速实现复杂的机器人操作任务。
极佳视界联合湖北人形机器人创新中心,基于高集成度人形机器人本体,首次实现了实时、长程、复杂、柔性操作的端到端控制。
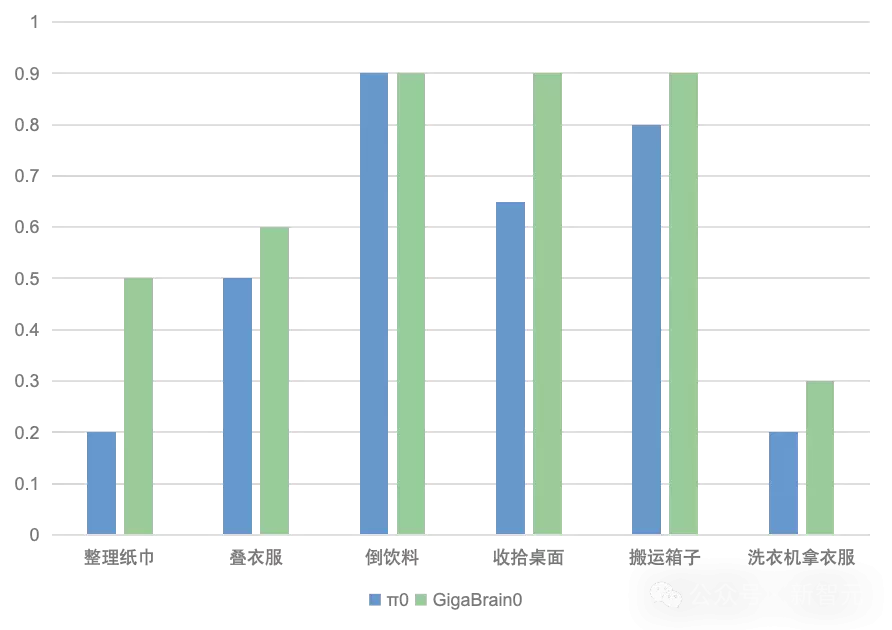
04 实验结果验证
GigaBrain-0通过真实机器人实验进行了全面评估,涵盖灵巧操作任务、长程任务和移动操作任务三大类别。评估结果表明,GigaBrain-0在多项任务上的成功率显著优于现有SOTA方法。
关于极佳视界
极佳视界专注于「世界模型平台 × 具身基础模型」的技术路线,致力于通过双轮闭环推动物理世界通用智能的发展。
在「世界模型」方向,极佳视界是国内技术创新和产业落地的领跑者,相关产品技术广泛应用于自动驾驶、具身智能、内容创作等方向。
在「具身大脑」方向,极佳视界通过全球领先的「世界模型平台」提供大规模高质量数据,训练效率比纯真机数据提升1-2个数量级,同时真机效果达到国内领先水平。
极佳视界由黄冠博士带领团队于2024年创立,是国内首家专注于「世界模型 × 具身大脑」方向的科技公司。
公司核心团队汇聚了来自清华、北大、中科院、中科大、WashU、CMU等全球知名院校的顶尖研究人员,以及微软、三星、地平线、百度、博世、NBC环球影业等全球知名企业高管,兼具业内领先的研究能力和产业化落地经验。
极佳视界是国内少数在「世界模型」和「具身大脑」方向都具备世界级综合实力的团队。在自动驾驶方向已与多个头部主机厂达成签约合作,在具身世界模型、具身大脑等方向已与多个具身本体、终端公司达成签约合作,应用于科研、教育、展览、数据采集、工业服务、家庭等多个场景。
极佳视界致力于通过「世界模型平台 × 具身基础模型」,创造物理世界通用智能。

游乐网为非赢利性网站,所展示的游戏/软件/文章内容均来自于互联网或第三方用户上传分享,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系youleyoucom@outlook.com。
 同类文章
同类文章

Vue Router路由守卫权限控制代码生成工具WorkBuddy使用指南
使用WorkBuddy等工具生成Vue路由守卫代码时,权限控制问题常源于项目配置、路由元信息缺失或守卫类型不匹配。解决方案包括:全局前置守卫通过白名单集中管控;路由独享守卫实现精准配置级控制;组件内守卫深度结合业务逻辑;自定义指令控制按钮级权限;组合式API项目需适配新写法。应根据项目架。

二狗PPT模板严肃吗?科技感与商务风自由切换设计指南
二狗PPT模板可通过调整配色、字体、图标动画和版式来切换风格。科技感需冷色高对比、无衬线字体、动态图标与发光效果;商务风宜用中性灰阶、稳重字体、简约动画与留白版式。具体操作涉及主题颜色自定义、字体替换及母版封面重构。

豆包AI助手角色设置教程 个性化人设定制指南
要让豆包AI稳定扮演特定角色,关键在于优化角色指令设定。可通过五种方法实现:一是“三要素锚定法”,一次性注入身份、知识与风格;二是“上下文渐进固化法”,通过多轮对话强化细节;三是“指令嵌套自检法”,要求AI先确认角色再响应;四是“智能体广场调用法”,直接使用官方成熟模板;五是“专属智能体创。

开源对话数据集对比:ShareGPT与OASST的特点与适用场景分析
ShareGPT数据集基于真实人机对话,注重多轮交互的连贯性,适合训练客服机器人等复杂任务模型。OASST数据集采用树状结构,侧重人类对回复的偏好排序,主要用于奖励模型训练与安全性对齐。两者在标注粒度、语言覆盖等方面各有侧重,选择需依据具体训练目标。

AI如何优化Monorepo项目依赖分析与版本管理
管理monorepo项目时,依赖关系复杂,跨包版本不一致等问题频发。通过启用工作区感知模式构建完整依赖图谱,可精准评估变更影响。执行语义化版本检查能识别类型兼容风险。利用Craft智能体可自动化执行依赖升级与迁移。还可自定义约束规则,自动校验和修复版本一致性,从而提升依赖管理效率。








- 日榜
- 周榜
- 月榜
 1
1
 2
2
 3
3
 4
5
6
7
8
9
10
相关攻略
4
5
6
7
8
9
10
相关攻略
 2015-03-10 11:25
2015-03-10 11:05
2021-08-04 13:30
2015-03-10 11:22
2015-03-10 12:39
2022-05-16 18:57
2025-05-23 13:43
2025-05-23 14:01
热门教程
2015-03-10 11:25
2015-03-10 11:05
2021-08-04 13:30
2015-03-10 11:22
2015-03-10 12:39
2022-05-16 18:57
2025-05-23 13:43
2025-05-23 14:01
热门教程
- 游戏攻略
- 安卓教程
- 苹果教程
- 电脑教程































 热门话题
热门话题
