




北大团队突破通用抓取技术,单条演示适配所有灵巧手

北京大学与BeingBeyond团队联合推出了DemoGrasp框架——一套简洁高效、适用于通用灵巧手抓取任务的学习方案。
在灵巧手通用抓取的研究中,因为动作空间维度复杂、任务涉及长距离探索且需要适应多样化物体,传统强化学习方法常常陷入探索效率低、奖励函数设计复杂等困境。
针对这些挑战,北大与BeingBeyond团队提出了DemoGrasp框架:
一种既简单又高效的灵巧手通用抓取学习方法。
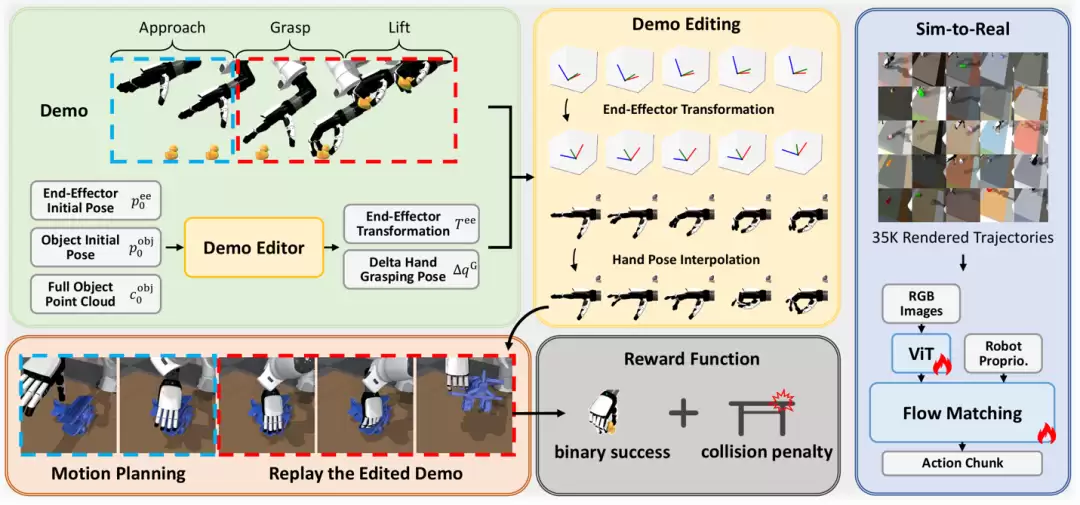
该方法以一次成功的抓取演示轨迹为基础,通过对轨迹中的机器人动作进行智能编辑,灵活适应不同物体与摆放姿态:通过调整腕部位姿来精准确认“抓取位置”,通过微调手指关节角度来优化“抓取方式”。
这一核心创新——将原本多步决策的马可夫过程重构为基于轨迹编辑的“单步MDP”,显著提升了强化学习在抓取任务中的学习效率和真实环境迁移性能。
核心设计:单条演示 + 单步强化学习
从“多步探索”到“全局编辑”
传统强化学习的困境:高维动作空间中复杂的探索难题
动作空间:每一步都需要控制高自由度机器人的所有关节指令。奖励设计:需要设计复杂的密集奖励函数,引导机器人避开碰撞、成功抓取并完成平滑运动。课程学习:需设计复杂的多阶段学习流程,帮助强化学习克服探索瓶颈。
DemoGrasp 的核心创举在于用“单条成功演示轨迹”替代“从零开始的探索”,将高维抓取任务转化为“演示编辑任务”,再通过单步强化学习优化编辑参数,最终结合视觉模仿学习完成虚拟到实机的迁移。
单条演示和轨迹编辑
一条抓取特定物体的成功轨迹,实际上蕴含了抓取任务通用的行为模式(例如“靠近物体→闭合手指→抬起手腕”),只需微调轨迹中的手腕和手指抓取方式,便能适配从未见过的新物体。
DemoGrasp仅需对一个物体(比如一个方块)采集一条成功抓取演示,即可通过物体中心的轨迹编辑,生成针对新物体、新位置的成功抓取策略:
腕部姿态编辑:在物体坐标系下,对原始轨迹中的每一个手腕位置点施加一个统一的变换,灵活调整手腕抓取方向和位置,适应不同大小、形状物体的合适抓取点。手指关节编辑:对手指的抓取关节角度施加一个增量,通过与演示轨迹的等比例插值,生成灵巧手从初始张开状态平滑到达新抓取姿态的动作轨迹。
单步强化学习
在仿真环境中,DemoGrasp利用IsaacGym创建了数千个并行世界,每个世界里都有不同的物体和随机摆放场景。
学习过程:每一个仿真世界中,策略网络根据初始观测(末端姿态和物体点云、位姿)输出一组手腕和手指编辑参数,执行编辑后的轨迹,根据执行过程中是否“抓取成功”和是否“发生碰撞”获得相应奖励。
通过海量试错和在线强化学习,策略学会根据不同的物体观测,输出恰到好处的编辑参数。
训练效率:在这个紧凑动作空间的单步MDP问题上,DemoGrasp使用单张RTX 4090显卡仅需训练24小时即可收敛至超过90%的成功率。
视觉蒸馏,虚实迁移
仿真中的强化学习策略依赖于精确的物体点云和位姿,这在现实中难以获取。DemoGrasp通过视觉模仿学习,将策略蒸馏成与真机对齐的RGB策略,实现从仿真到真机的直接迁移。
数据采集:在仿真中运行强化学习策略,记录下上万条成功轨迹:包括渲染的RGB图像、每一时刻的机器人本体感知和关节角度动作。
模型训练:采用流匹配生成模型的学习方法,学习从图像观测和机器人本体感知预测动作。
为缩小仿真到真机的视觉图像差异,训练还使用了预训练的ViT提取图像特征,并在仿真数据收集时充分地进行了域随机化(随机化光照、背景、物体颜色纹理、相机参数等)。
多模态适配:DemoGrasp适配单目/双目、RGB/深度相机等多种相机观测。
实验表明,双目RGB相机组合的效果最佳,能够更好利用纹理和轮廓等信息成功抓取小而薄的物体。
实验结果:仿真和真机双优,全面提升灵巧抓取的泛化性和扩展性
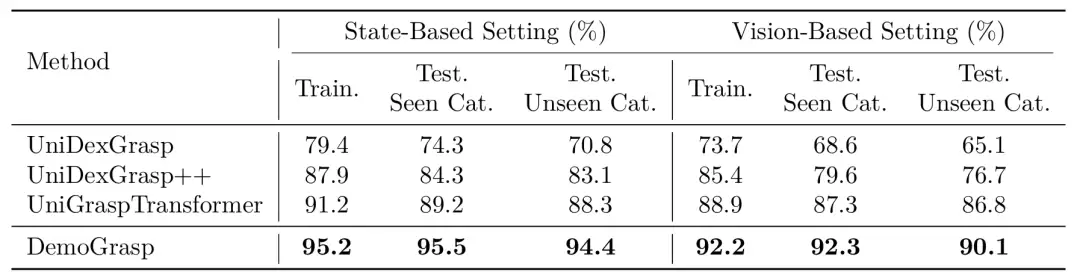
DexGraspNet是灵巧抓取领域的权威数据集(3.4K+物体)。
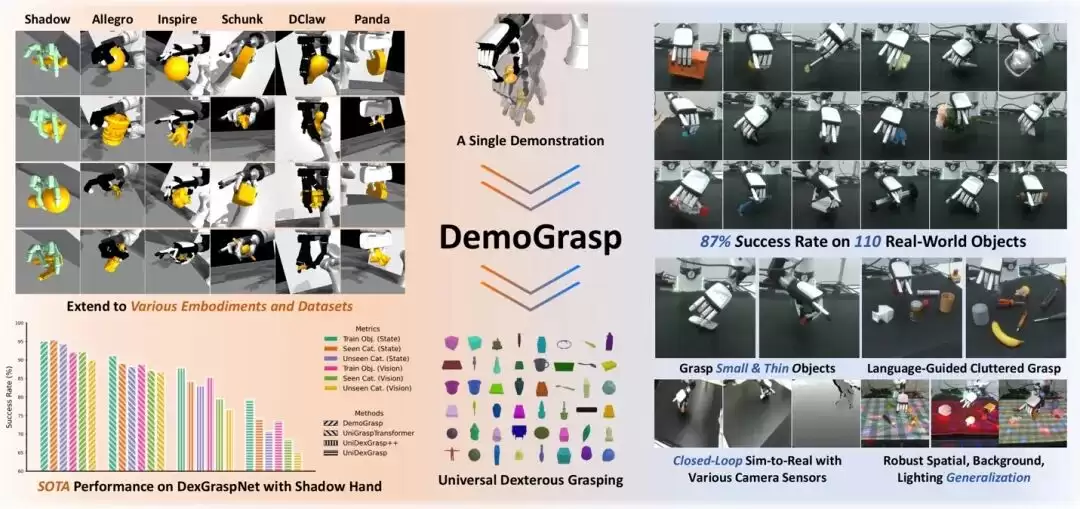
DemoGrasp在该数据集上使用Shadow Hand抓取,性能显著优于现有方法:视觉策略成功率高达92%,训练集到测试集的泛化差距仅为1%,且适应大范围物体位置随机化(50cm×50cm)、具备更强空间泛化能力。
跨本体扩展:适配任意灵巧手和机械臂本体
DemoGrasp无需调整任何训练超参数,成功适配6种不同形态的灵巧手(五指、四指灵巧手,三指夹爪和平行夹爪等),在175个物体上训练后,在多个未见过的物体数据集上达到了84.6%的平均成功率。
高性能的虚实迁移
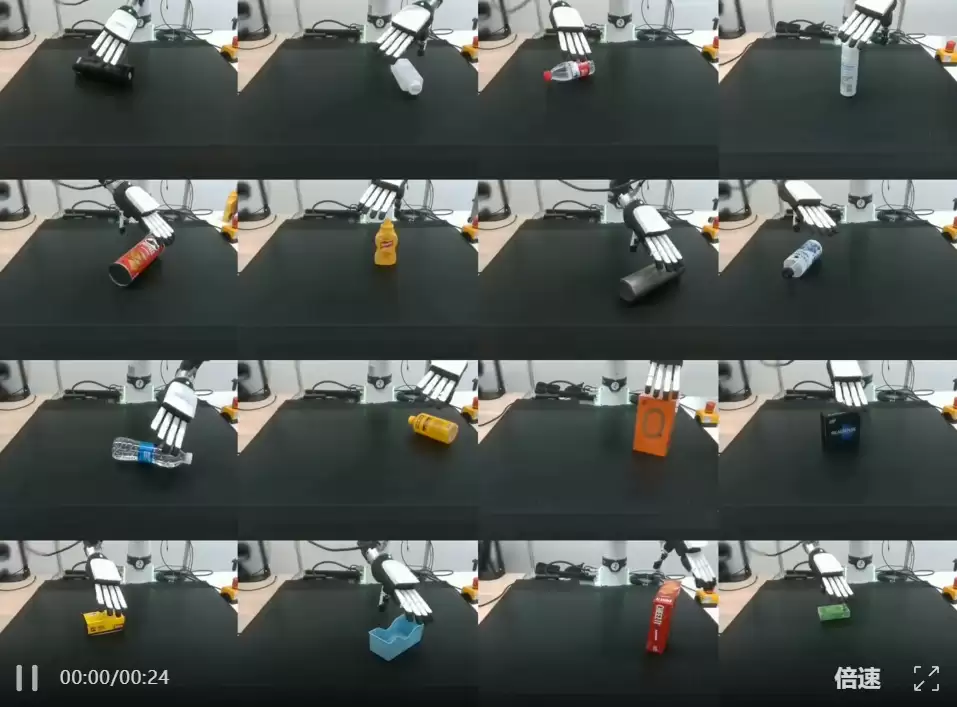
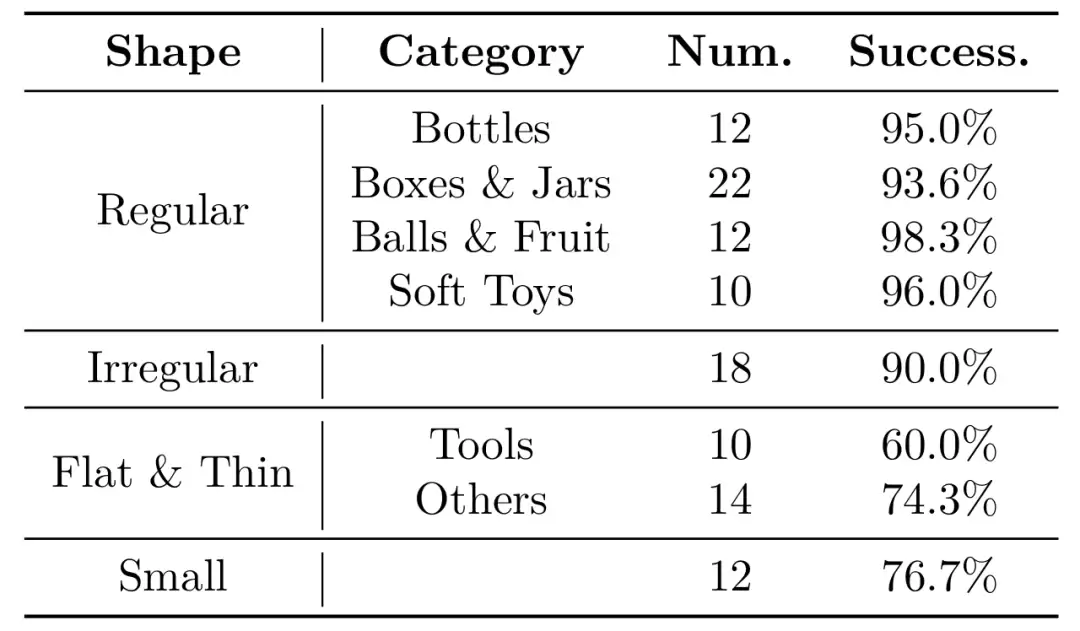
在真实机器人测试中,使用Franka机械臂和因时灵巧手,DemoGrasp成功抓取了110个未见过的物体。
在常规大小物体分类上,DemoGrasp成功率均达到90%以上;
对于扁平物体(手机壳、剪刀等)和小物体(瓶盖、小黄鸭等)这类困难抓取任务,策略能够准确抓取物体、避免碰撞,成功率保持在70%左右。
DemoGrasp框架还展现出对复杂抓取任务的扩展能力,支持在杂乱多物体摆放的场景下实现用语言指令引导抓取,且达到84%的单次抓取成功率。即使面对光照、背景和物体摆放的大幅变化,策略的成功率依然保持稳定。

DemoGrasp开创了融合少量人类演示实现高效机器人强化学习的新路径,将成为未来功能性抓取、工具使用、双手操作等更多灵巧手任务的强大基础。
训练时策略的闭环能力是当前方法的一个局限,后续研究将通过对演示轨迹更细粒度的拆分,增强强化学习策略的实时调整与容错恢复能力。
此外,DemoGrasp可以结合多模态大模型,实现开放场景下的自主抓取智能体。
项目主页:https://beingbeyond.github.io/DemoGrasp/
论文:https://arxiv.org/abs/2509.22149

游乐网为非赢利性网站,所展示的游戏/软件/文章内容均来自于互联网或第三方用户上传分享,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系youleyoucom@outlook.com。
 同类文章
同类文章

蚂蚁开源万亿参数思考模型Ring-2.5-1T详解
Ring-2 5-1T是什么 在当今大模型技术激烈竞争的赛道上,追求更长的上下文处理能力和更强大的深度推理性能已成为核心焦点。近日,蚂蚁集团旗下的inclusionAI团队重磅开源了Ring-2 5-1T模型,这是一个参数规模高达万亿级别的混合线性思考大语言模型。该模型基于先进的Ling 2 5架构

Teamily AI:原生智能通讯平台,开启人机协作新纪元
Teamily AI是什么 想象一下,你手机里的微信群聊,除了家人朋友同事,还多了一位特殊的“成员”——它从不缺席,能瞬间理解所有对话,还能帮你处理图片、视频甚至写报告。这不再是科幻场景,而是南加州大学团队带来的现实:全球首个AI原生即时通讯平台,Teamily AI。 它的核心思路很巧妙:不再把A

字节跳动Seedream 5.0 Lite AI图像生成模型详解
Seedream 5 0 Lite是什么 在AI图像生成技术飞速发展的今天,字节跳动Seed团队正式推出了其重磅升级产品——Seedream 5 0 Lite。作为Seedream 4 0的迭代版本,这款全新的AI绘画模型在文本理解、视觉推理与图像生成三大核心维度上实现了显著突破。 该模型采用了创新

WorkAny Bot云端AI助手基于OpenClaw框架详解
WorkAny Bot是什么 想象一下,有一个永不掉线的智能助手,它住在云端,随时准备响应你的召唤。这就是WorkAny Bot——一个基于OpenClaw AI框架构建的云端智能体。它的核心价值在于,将强大的AI能力变成一项即开即用的服务。 你可以把它理解为你私人的、功能齐全的AI工作站。它支持接

KiloClaw推出全托管云服务OpenClaw
KiloClaw是什么 想快速拥有一个能接入几十个聊天平台、还能执行系统命令的AI助手,但一听到要自己部署维护就头疼?这确实是很多开发者和团队面临的现实困境。OpenClaw这个开源项目功能强大,支持50多种平台,可真要自己从零搭建,光是配置环境可能就得折腾半小时以上,后续的更新、监控更是麻烦事。








- 日榜
- 周榜
- 月榜
 1
1
 2
2
 3
3
 4
5
6
7
8
9
10
相关攻略
4
5
6
7
8
9
10
相关攻略
 2015-03-10 11:25
2015-03-10 11:05
2021-08-04 13:30
2015-03-10 11:22
2015-03-10 12:39
2022-05-16 18:57
2025-05-23 13:43
2025-05-23 14:01
热门教程
2015-03-10 11:25
2015-03-10 11:05
2021-08-04 13:30
2015-03-10 11:22
2015-03-10 12:39
2022-05-16 18:57
2025-05-23 13:43
2025-05-23 14:01
热门教程
- 游戏攻略
- 安卓教程
- 苹果教程
- 电脑教程































 热门话题
热门话题
