




UniPat AI团队研发:BabyVision多模态理解评测集核心解析

BabyVision深度解读
BabyVision 是由 UniPat AI 团队精心打造的一套面向视觉理解能力的多模态评估基准。它的核心目标,是系统性衡量多模态语言模型与图像生成模型在纯粹视觉推理任务中的真实表现。该评测集精心划分出两大核心赛道:MLLM 理解能力评估与生成式视觉能力评估。整个任务体系围绕四大基础视觉认知维度构建——精细辨别、视觉追踪、空间感知及视觉模式识别,全面覆盖 22 类细分任务,总计包含 388 道高质量题目。所有题目均经过严谨的语言干扰控制设计,以最大程度削弱文本线索依赖,从而精准刻画模型的原生视觉理解水平。
BabyVision 的核心优势
- 聚焦纯视觉推理能力测评:依托高信噪比的视觉任务设计,检验 MLLMs 与生成模型在脱离强语言引导下的视觉分析与推理能力,有效暴露其在底层视觉建模上的薄弱环节。
- 双轨制评估框架:分别设立面向理解型模型的 MLLM 评测赛道与面向生成型模型的生成能力赛道,实现对多模态模型谱系的全覆盖评估。
- 覆盖关键视觉认知维度:从微观细节判别(精细辨别)、动态目标关联(视觉追踪)、几何关系建模(空间感知)到结构规律挖掘(视觉模式识别),构建层次化能力图谱。
- 弱化语言先验干扰:所有任务均规避可被语言模型单独破解的语义路径,确保评估结果真实反映模型对图像内容本身的感知与推理能力。
- 提供标准化测评报告与公开排行榜:以准确率为核心指标呈现各模型性能,并同步标注人类平均表现作为参照基准,便于横向对比与趋势分析。
- 开箱即用的评估支持体系:配套提供完整数据集、自动化评估脚本、参数化配置接口(如环境变量控制)及详尽使用文档,显著降低研究接入门槛。
- 驱动视觉智能持续进化:通过定位共性缺陷,为下一代多模态架构设计、训练范式优化及视觉表征学习提供实证导向的技术突破口。
BabyVision 的实测表现
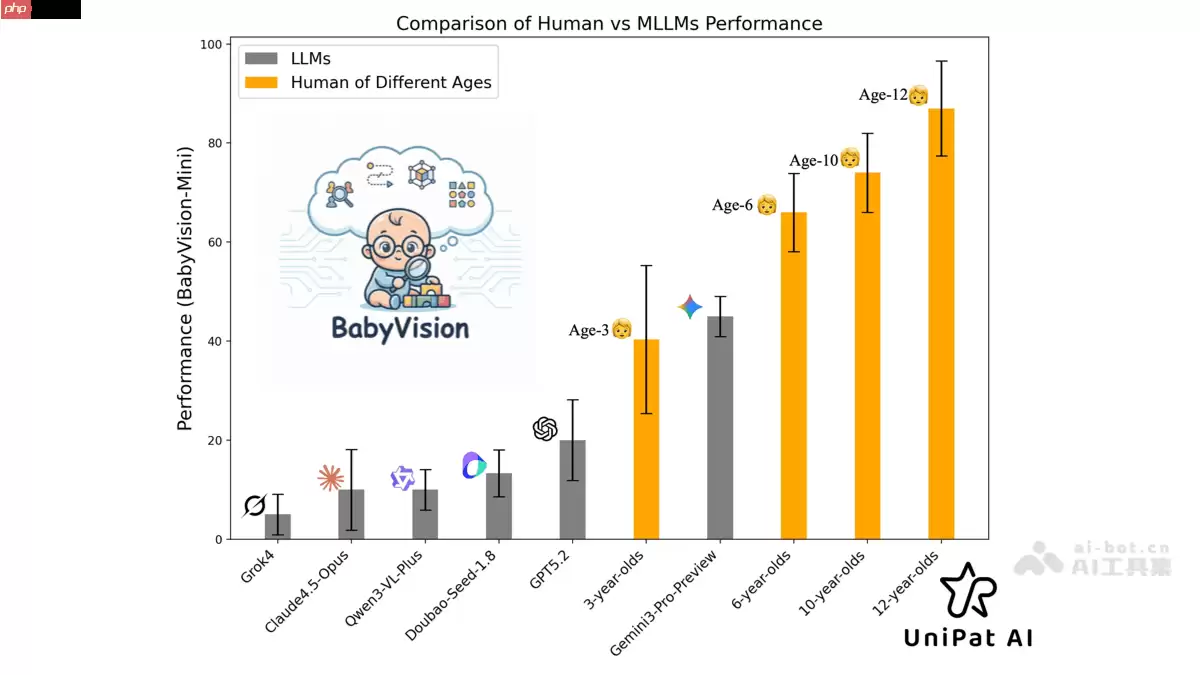
- 人类表现树立高标:参与测试的人类受试者平均准确率达 94.1%,凸显人类视觉推理系统的高度鲁棒性与泛化性。
- 闭源模型呈现明显梯队分化:Gemini3-Pro-Preview 以 49.7% 居首,GPT-5.2 与 Doubao-Seed-1.8 分别为 34.4% 和 30.2%,但整体距人类水平仍有巨大鸿沟。
- 开源模型普遍处于低位区间:Qwen3-VL-Plus 仅取得 19.2% 的准确率,多数开源方案在该评测中表现乏力,与顶尖闭源模型及人类基线均存在显著差距。
- 视觉基础能力短板突出:无论模型来源如何,在涉及时序目标跟踪、三维空间推演、几何抽象归纳等高阶视觉任务上,性能普遍大幅下滑,印证当前多模态模型视觉根基尚不牢固。
- 生成式任务达成率偏低:尽管部分模型在输出风格上趋近人类作答习惯,但在保证逻辑正确性与结果完备性方面仍缺乏稳定保障。
- 评测结果赋能技术迭代:精确的问题归因与能力映射,为后续模型结构增强、视觉-语言对齐机制改进及新型训练策略探索提供了明确靶向。
项目获取与支持
- 开源仓库:项目相关资源已通过公开平台发布,可供获取和使用。
BabyVision 的典型应用场景
- 多模态模型能力诊断:作为视觉推理专项“体检工具”,支撑对 MLLMs 与生成模型视觉理解边界的量化评估与问题定位。
- 前沿算法验证平台:为视觉语言联合建模、跨模态对齐优化、生成可控性提升等方向的研究提供统一、可信的实验基准。
- 模型选型与性能对标:借助标准化测评流程,辅助开发者在不同技术路线间进行客观比较,支撑工程落地决策。
- AI教学实践载体:面向高校与培训机构,提供可视化强、任务清晰的案例资源,助力多模态人工智能原理教学与实践训练。
- 垂直领域技术适配参考:为自动驾驶感知模块、医学影像辅助判读、工业质检系统等需强视觉推理能力的应用场景,提供模型能力适应性评估依据。
- 学术成果产出支撑:作为可复现、可扩展的评测基础设施,服务于多模态视觉理解方向的论文实验、消融分析与方法对比,加速领域知识沉淀。

游乐网为非赢利性网站,所展示的游戏/软件/文章内容均来自于互联网或第三方用户上传分享,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系youleyoucom@outlook.com。
 同类文章
同类文章

特斯拉德州工厂部署14辆无方向盘自动驾驶出租车
特斯拉的机器人出租车,终于从概念驶入了现实。就在最近,其位于德州的超级工厂完成了首批14辆无方向盘Cybercab的部署。这可不是简单的测试车,而是标志着特斯拉酝酿已久的Robotaxi战略,正式迈入了规模化验证的关键一步。 仔细观察这批车辆,你会发现它们与去年10月“We Robot”活动上亮相的

魏牌V9X搭载归元S平台引领AI豪华出行新时代
4月17日,一场以“契约”为核心的技术盛宴在保定拉开帷幕。魏牌归元S技术发布会暨V9X预售发布会,不仅揭开了长城汽车36年造车智慧的集大成之作——归元S平台,也宣告了其首款旗舰车型魏牌V9X以37 18万元起的预售价,正式开启全球征程。这个平台,与其说是一套技术方案,不如说是一次以“用户价值”为锚点

DeepSeek估值680亿融资20亿 梁文锋首次回应
本周五,人工智能行业迎来一则关键动态。 据The Information、路透社等多家权威媒体援引知情人士消息,中国AI明星企业深度求索(DeepSeek)正与投资方展开洽谈,计划以约100亿美元估值进行新一轮融资,目标筹集至少3亿美元资金。 从行业渠道获悉,DeepSeek接触投资机构的情况属实,

WorkBuddy Tabbit OpenCLI 三角协同高效使用指南
做AI工具调研时,有个现象挺有意思:网上文章要么说Tabbit是OpenClaw的最佳搭档,要么夸OpenCLI是新一代浏览器自动化神器,但很少有人把这三者放在一起讨论。 今天要聊的,正是WorkBuddy、Tabbit和OpenCLI这三者如何协同工作,形成一个高效的闭环。 一、为什么需要三角协同

Mythos推动AI进入行动时代从语言理解迈向动手操作
4月8日,Anthropic的一则官宣,在看似平静的AI湖面上投下了一颗深水冲击波。他们发布了Claude Mythos Preview,但紧接着,又以一种近乎“自我封印”的姿态,亲手为这颗冲击波套上了层层枷锁。 这完全不像一场常规的发布会。没有庆祝,没有香槟,也没有宣布全面开放。相反,Anthro








- 日榜
- 周榜
- 月榜
 1
1
 2
2
 3
3
 4
5
6
7
8
9
10
相关攻略
4
5
6
7
8
9
10
相关攻略
 2015-03-10 11:25
2015-03-10 11:05
2021-08-04 13:30
2015-03-10 11:22
2015-03-10 12:39
2022-05-16 18:57
2025-05-23 13:43
2025-05-23 14:01
热门教程
2015-03-10 11:25
2015-03-10 11:05
2021-08-04 13:30
2015-03-10 11:22
2015-03-10 12:39
2022-05-16 18:57
2025-05-23 13:43
2025-05-23 14:01
热门教程
- 游戏攻略
- 安卓教程
- 苹果教程
- 电脑教程































 热门话题
热门话题
