




EmbodiChain开源:100%生成式数据驱动,自动训练具身智能模型

机器之心发布
论文地址:https://www.techrxiv.org/doi/full/10.36227/techrxiv.176153394.41323502开源主页:https://dexforce.com/embodichain/index.html#/代码仓库:https://github.com/DexForce/EmbodiChain技术文档:https://dexforce.github.io/EmbodiChain/introduction.html
大语言模型的爆发,让大家见证了 Scaling Law 的威力:只要数据够多、算力够猛,智能似乎就会自动涌现。但在机器人领域,这个公式似乎失效了。
在 LLM 时代,数据是「存量」,我们只需要负责「清洗」;在具身智能时代,数据必须是「增量」,我们必须具备「创造」数据的能力。
不同于互联网上唾手可得的万亿级文本,机器人所需的、经过 3D 标定且符合物理规律的高质量交互数据,极度稀缺且昂贵。正因如此,数据采集范式成为了近年来行业研究的绝对焦点。
可以看到,整个行业正在向着更低成本、更便捷的方向全速推进:从昂贵的遥操设备,到基于动捕手套的灵巧手捕捉和更加便携式的夹爪方案,再到如今甚至不再需要佩戴手套、仅凭双手演示即可采集数据的创新方案。这些轻量化的数采范式正在将人类的经验数字化,这一路径不仅充满价值,更值得持续深耕,它是连接人类技能与机器人动作的桥梁。
整个行业在将具身智能推向大模型时代的这个目标上狂奔。
但是,即使是最极致的采集效率,客观上仍受限于物理时间的流逝和人力成本的边界。当下没有任何现有的物理采集范式,能匹配 LLM 训练所需的「互联网级」规模。这成为了具身智能迈向更高阶智能的最大桎梏。
效率定律
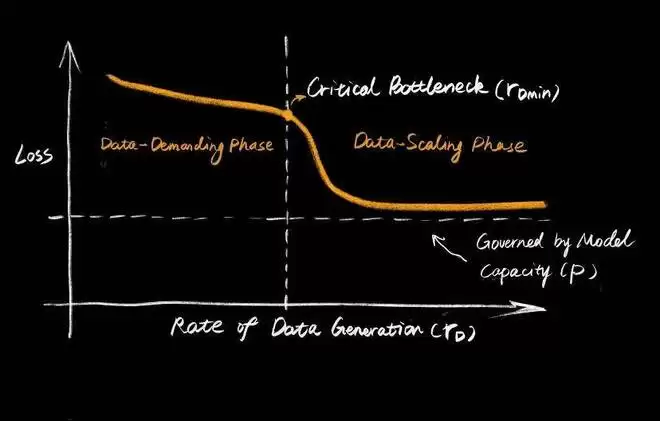
效率定律 (Efficiency Law) 下模型性能与数据生成速率的关系
要跨越这个鸿沟,除了物理采集的持续精进,另一种极具潜力的解决方式,就是构建一个能够超高速、自动化生成物理现实的数字世界(跨维智能团队在《GS-World》中详述了这一路径)。
在这个基于物理引擎的生成式世界中,数据的生成速率超越了时间的限制(Efficiency Law);机器人可以在零成本的试错中习得对物理因果的深刻理解;所有的边缘情况(Corner Cases)都可以在这里被模拟、被攻克。
GS-World 与 EmbodiChain
今天,跨维智能正式开源 EmbodiChain。作为通往GS-World(基于生成式仿真的世界模型)的基石,EmbodiChain 不仅仅是一个数据和模型平台,更是一次对具身智能学习范式的重构。
跨维团队提出并验证一个大胆的假设:仅凭 100% 的生成式仿真数据,只要生成速率(Rate of Generation)突破临界点,机器人就能在真实世界中涌现出超越 SOTA 的泛化能力。
这不是科幻,这就是跨维正在验证的效率定律(Efficiency Law)。
然而,要将 GS-World 从蓝图变为现实,绝非易事。跨维研究团队必须面对并攻克三个核心科学难题,这也是 EmbodiChain 致力于解决的关键:
如何实现数据生产自动化?真实世界极其复杂,如何仅凭少量先验(如一段视频、一句描述),就在数字世界中自动重建、生成海量且物理一致的场景与任务,而无需人工手动搭建?如何打破「虚实鸿沟」(Sim2Real Gap)?仿真数据再多,如果不能迁移到真机也是徒劳。如何在不依赖或尽量少依赖真实数据微调的情况下,让模型习得适应真实世界噪声与动态变化的鲁棒策略?如何突破数据生成的「IO 墙」?Scaling 需要亿级甚至十亿级的交互步数。传统的「生成 - 存储 - 读取 - 训练」模式效率极低。如何构建极致高效的数据流转机制,实现「在线数据流」?
EmbodiChain:一条永不停歇的「在线数据流和模型生产线」
为了实现这一愿景,跨维智能构建了GS-World(Generative Simulation World Model,生成式仿真世界模型)的核心基石 ——EmbodiChain。
EmbodiChain 作为一个底层的基建技术,可以把它看作去存储化的数字化流水线。Scaling 需要亿级甚至十亿级的交互步数,传统的「生成 - 存储 - 读取 - 训练」模式在面对海量 3D 数据时,存储与传输将成为不可承受之重。
在 EmbodiChain 的架构中,可以彻底抛弃「先存硬盘、再读硬盘」的陈旧范式,取而代之的是在线数据流(Online Data Streaming)和模型自动生产线。

EmbodiChain 的核心工作流。数据在生成的同时即被消费,橘色的数据流贯穿全场,无需落地存储。
这条流水线是如何工作的?
世界生成(Generative Simulation):引擎不仅是环境,更是造物主。Real2Sim 模块从极少的真实样本中提取物理先验,Gen2Sim 模块则响应语言指令,自动构建出符合牛顿力学等物理规律的 3D 场景与资产。数据扩增(Data Scaling):数据不仅要多,还要「难」。系统自动进行视觉增强、物理参数随机化,并剔除那些机器人「够不着」的无效采样。自我修复(Closed-loop Recovery):真正的智能来自于从错误中学习。当仿真中的机器人抓取失败,系统会自动生成修正轨迹。这种「失败 - 修正」的闭环,比单纯的成功演示更有价值。
这一切都在 GPU 内部并行高速运转,数据如洪流般产生,训练完即销毁,不留下一丝冗余,只留下模型能力的增长。
路线之争:机器人需要的是物理精确的生成式模型
在通往具身智能世界模型的路上,目前存在两条截然不同的路线。
一条是近期火热的视频生成路线(Video World Model),如 Sora 或 LTX-Video,它们试图通过「画出」下一帧来模拟世界。虽然视觉效果惊艳,但一些对比实验揭示了其致命弱点:幻觉。
视频模型生成的画面往往缺乏长程的时空一致性,且很难精确遵循动力学方程。用这种「做梦」产生的数据训练机器人,就像让一个飞行员在爱丽丝的仙境中学习开飞机 —— 看着很美,一上真机就坠毁。
相反,EmbodiChain 选择的是GS-World 路线(基于生成式仿真的世界模型)。
物理先验(Physical Priors):跨维智能坚持世界模型必须是 3D 的、交互式的、物理严谨的。特权信息(Privileged Information):在 EmbodiChain 中,使用者拥有上帝视角。比如使用者能够获取物体的精确掩码、空间关系和可供性(Affordance)。通过训练模型预测这些真实世界中不可见的「特权信息」,迫使模型理解了场景背后的几何本质,而不仅仅是表面的像素。
这正是 Yann LeCun 所倡导的理念:世界模型应该是对世界状态的预测与规划。
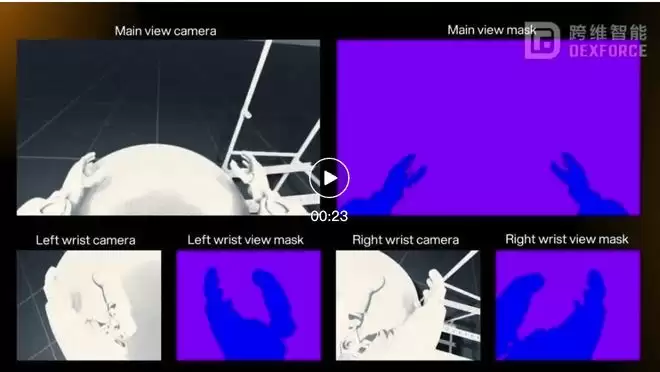
EmbodiChain中可以获取的特权信息示例
零真实数据,VLA 真的可行吗?
为了验证这套「效率定律」,跨维智能做了一件极端的测试:不使用任何真实数据训练模型。
跨维智能训练出的 Sim2Real-VLA 模型,在真实世界中执行任务。结果令人惊讶:
远超基线:在没有任何真实数据微调的情况下,它在操作成功率上大幅领先 ACT、Diffusion Policy 等主流方法。无惧干扰:即使跨维智能像「捣乱者」一样更换桌布、移动物体、改变光照,模型依然稳如泰山。甚至在某些任务中,由于去除了真实数据中容易过拟合的背景噪声,模型的表现反而比用真实数据训练还要好。
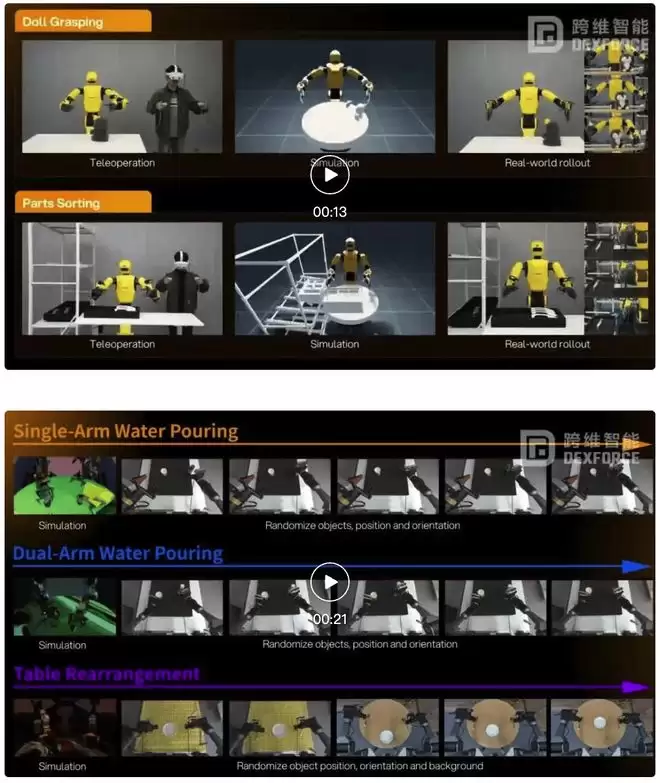
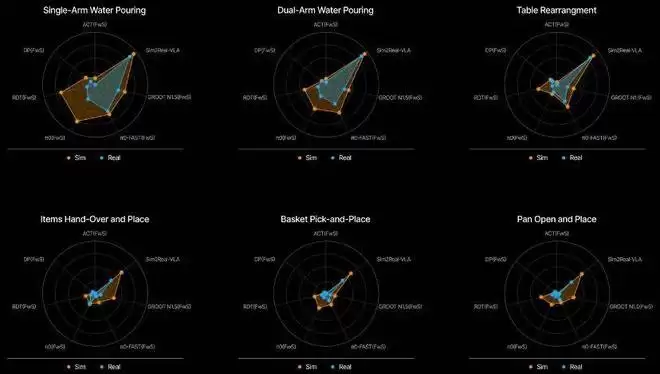
Sim2Real-VLA 在全生成数据训练下,不仅击败了 SOTA,更展现了惊人的鲁棒性。
愿景:通往 GS-World 的「效率奇点」
EmbodiChain 的开源,只是一个开始。
GS-World 蓝图远不止于此。在跨维智能的规划中,这是一个引擎驱动的闭环路径(Engine-driven Loop):
不仅环境是生成的,任务也是生成的;不仅策略是进化的,机器人的身体结构(Morphology)也会随着任务需求协同进化。
跨维智能希望 EmbodiChain 能成为每一位具身智能研究者的基础设施。不需要再为了几千条数据而在实验室里没日没夜地遥操作,不需要再为几十 TB 的硬盘存储发愁。
因为智能的未来,不应该被困在数据的匮乏中。
EmbodiChain 现已开源,邀请你一起见证具身智能的「效率奇点」。
文中视频链接:https://mp.weixin.qq.com/s/IGe1myOEmAW7JOrQyBLhBA

游乐网为非赢利性网站,所展示的游戏/软件/文章内容均来自于互联网或第三方用户上传分享,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系youleyoucom@outlook.com。
 同类文章
同类文章

腾讯元宝助力健身工作室会员营销方案与续卡话术撰写指南
腾讯元宝可辅助制定健身工作室会员营销方案与续卡话术,但需人工提供精准业务参数并明确核心诉求。通过多轮追问可细化话术颗粒度,嵌入具体数据与场景化表达。生成内容必须人工校验合规性,确保符合平台规范与行业要求,避免禁用词汇与诱导承诺。

豆包AI如何帮你快速审查合同关键条款
当豆包AI提取合同关键条款不准确时,通常因文本格式混乱、信息未锚定或指令模糊所致。建议依次尝试:启用结构化摘要自动解析条款;粘贴文本时用关键词指令引导聚焦;运用COSTAR框架明确提问背景与要求;通过分段追问交互式澄清模糊表述,从而精准定位核心信息。

Trae代码重构指南:一键优化代码结构与最佳实践
Trae提供AI驱动的代码重构功能,支持五种方法应对不同场景。局部编辑模式可精准优化选中代码;Chat模式能跨文件协同优化;Builder模式适用于模块或架构升级;Qwen3-Coder-Plus模型专项提升可测试性;系统还能智能识别代码坏味道并推荐重构方案。用户通过快捷键和自然语言指令即可操作,预览确认后应用变更。

ClawBot如何快速调整话术上线季节性促销活动
节假日期间ClawBot话术切换慢,通常因专属提示词模板缺失、活动参数未注入或策略未绑定活动ID所致。可通过四步解决:配置节日专属模板并热生效;绑定活动ID与话术策略;注入实时促销参数;最后进行灰度测试与数据优化,确保话术准确高效。

豆包大模型推理成本优化方法与降本策略
豆包大模型部署需优化配置:批量处理应确保batch_size≥4,采用预填充与解码分离模式。移动端需手动指定量化位数,避免长上下文在轻量版运行。迁移模型须用专用工具重训路由参数,专家数量不宜过多。量化应精细化,仅针对部分计算密集模块,并禁用框架自动转换,以平衡效率与精度。








- 日榜
- 周榜
- 月榜
 1
1
 2
2
 3
3
 4
5
6
7
8
9
10
相关攻略
4
5
6
7
8
9
10
相关攻略
 2015-03-10 11:25
2015-03-10 11:05
2021-08-04 13:30
2015-03-10 11:22
2015-03-10 12:39
2022-05-16 18:57
2025-05-23 13:43
2025-05-23 14:01
热门教程
2015-03-10 11:25
2015-03-10 11:05
2021-08-04 13:30
2015-03-10 11:22
2015-03-10 12:39
2022-05-16 18:57
2025-05-23 13:43
2025-05-23 14:01
热门教程
- 游戏攻略
- 安卓教程
- 苹果教程
- 电脑教程































 热门话题
热门话题
