




全球首个0.5M极佳视界斩:GigaBrain的进化之道

机器之心发布
免费影视、动漫、音乐、游戏、小说资源长期稳定更新! 👉 点此立即查看 👈
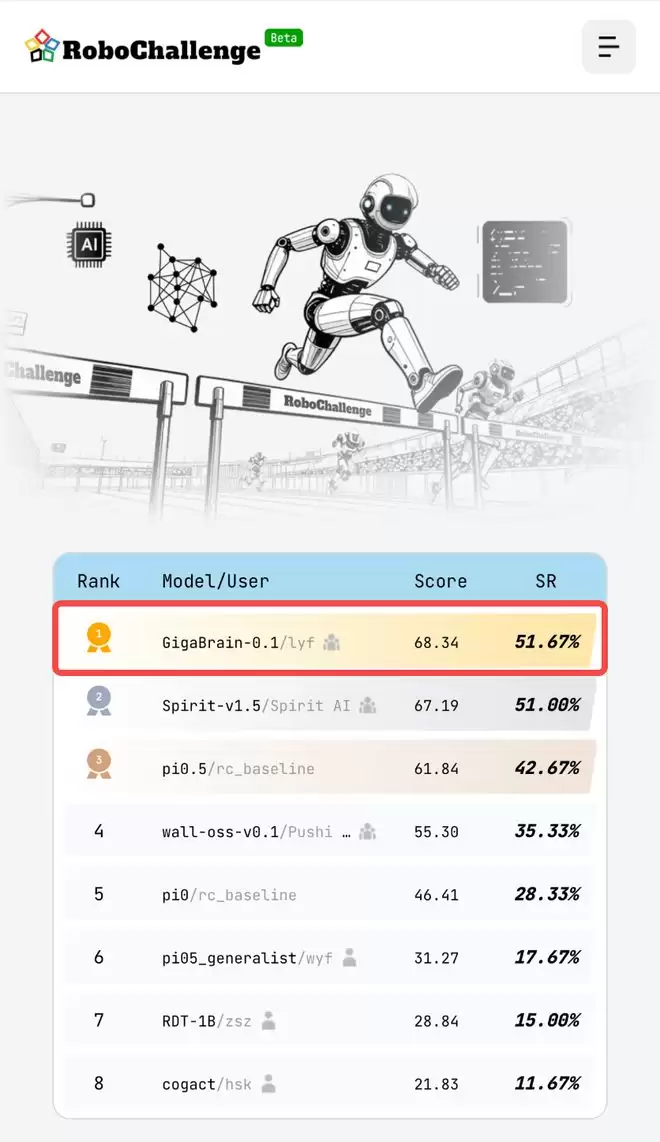
具身世界模型新一代原生范式重磅登场!继具身基础模型 GigaBrain-0.1 斩获 RoboChallenge 全球第一后,性能更强大的 GigaBrain-0.5M* 又来了。
作为依托世界模型实现自我进化的 VLA 大模型,GigaBrain-0.5M* 在家庭叠衣、服务冲煮咖啡、工业折纸盒等多个真实机器人任务中,均实现数小时零失误、持续稳定运转。

https://mp.weixin.qq.com/s/CCIAKyB9fw00WD9qD-HcMQ
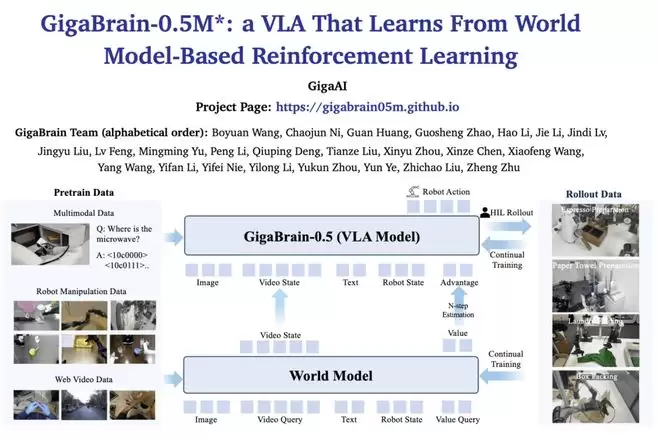
GigaBrain-0.5M* 作为一款基于世界模型条件驱动(World Model-Conditioned)的 VLA 大模型,以世界模型对未来状态与价值的预测结果作为条件输入,可显著提升模型在长时程任务中的鲁棒性。
在此基础上,GigaBrain-0.5M* 创新引入人在回路(Human-in-the-Loop)持续学习机制,系统依托经人工筛选与校正的模型推演轨迹开展迭代训练,基于真实环境交互反馈持续优化决策策略,最终实现「行动 — 反思 — 进化」的闭环式持续学习与自主迭代升级。
论文链接:https://arxiv.org/pdf/2602.12099项目链接:https://gigabrain05m.github.io/
01
基于世界模型的强化学习训练范式
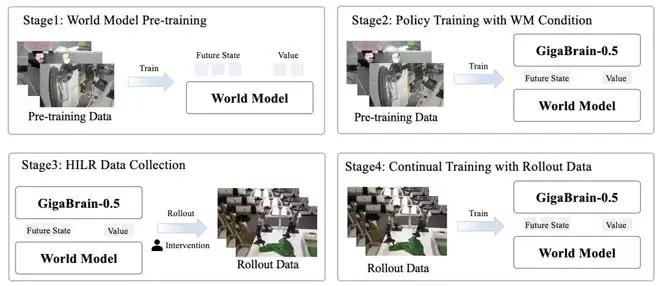
在 GigaBrain-0.5M* 的研发中,极佳视界提出基于世界模型的强化学习范式,并采用迭代式四阶段闭环训练流程:
基于大规模机器人操作数据完成世界模型预训练,实现对未来状态及对应价值的精准预测;以世界模型输出的未来状态预测与价值评估为条件,对策略网络进行微调,以指引动作决策;将条件化策略部署至真实物理环境,依托人在环干预机制,采集模型自主推演轨迹数据;利用经筛选后的有效轨迹数据集,联合优化世界模型与决策策略,实现模型持续学习与自主进化。
02
数小时连续零失误执行
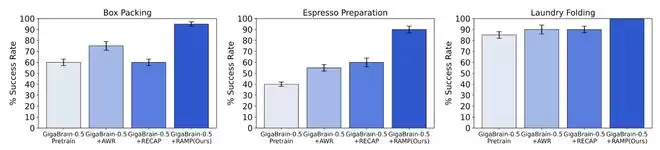
在与 AWR、RECAP 等主流模仿学习与强化学习基线方法的系统对比中,GigaBrain-0.5M* 展现出显著优势,在相同任务设定下,相较于由 π*0.6 由所提出的 RECAP 基线,任务成功率提升近 30%,并实现了稳定可靠的模型效果。
尤其在高难度长时程任务中,面对折纸盒、咖啡制备、衣物折叠等包含多阶段操作、精细感知与持续决策的复杂场景,GigaBrain‑0.5M* 均实现接近 100% 的任务成功率,并可稳定复现成功执行轨迹,充分彰显出卓越的策略鲁棒性。

https://mp.weixin.qq.com/s/CCIAKyB9fw00WD9qD-HcMQ
https://mp.weixin.qq.com/s/CCIAKyB9fw00WD9qD-HcMQ

https://mp.weixin.qq.com/s/CCIAKyB9fw00WD9qD-HcMQ
03
高效且准确的价值预测
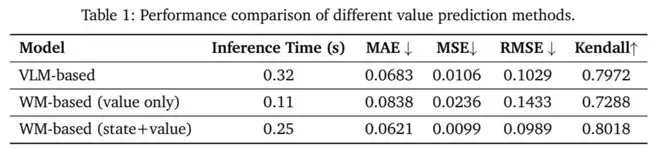
实验结果表明,基于世界模型的价值预测方案在执行效率与预测精度上,均优于 π*0.6 所提出的 VLM 方案。该方案的核心优势源自对未来状态的显式建模与世界模型单步降噪机制,可为价值函数提供关键的时序上下文支撑,让价值估计实现更高效、更精准、更稳定的输出。
以叠衣服任务为例:任务初期,机械臂反复调整衣物姿态时,预测价值呈现合理波动;当衣物摆正、进入稳定叠放阶段,价值曲线稳步上升;若中途出现干扰物,价值骤降以反映任务受阻;待干扰物被移除后,价值迅速恢复增长趋势。这种与任务物理进程高度对齐的价值演化,正是世界模型提供「认知先验」的直接体现。

https://mp.weixin.qq.com/s/CCIAKyB9fw00WD9qD-HcMQ
04
上万小时的训练数据
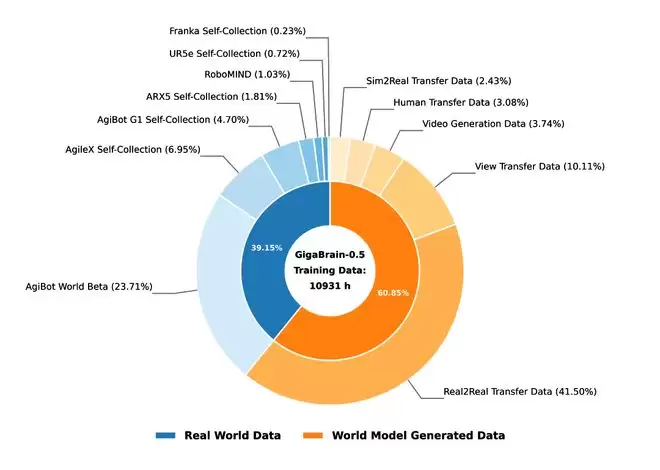
GigaBrain-0.5M* 的基座模型 GigaBrain-0.5 基于总计 10,931 小时的多样化机器人操作数据进行预训练,其中 61%(6,653 小时)由自研具身世界模型 GigaWorld 高保真合成,覆盖纹理迁移、视角变换、人手到机械臂映射等丰富场景;剩余 39%(4,278 小时)源自真实机器人采集,确保策略在物理世界中的可执行性。
海量数据的引入显著拓展了模型的任务覆盖广度与策略鲁棒性,使其在面对复杂、长时程操作任务时具备更强的泛化能力;而 GigaWorld 生成的合成数据则有效突破了真实采集的长尾瓶颈。通过可控地生成新纹理、新物体位姿与新观测视角下的训练样本,增强了模型在分布外场景中的适应性,为具身智能走向开放世界奠定了数据基石。
公司及团队介绍
极佳视界是一家具身智能和通用机器人公司,围绕「基模 - 本体 - 场景」三位一体,为工业、商业、家庭等场景提供软硬一体的具身智能机器人解决方案,推动通用机器人服务千行百业、走进千家万户。
公司核心团队包括清华、北大、中科院、中科大、WashU、CMU 等全球知名院校顶尖研究人员,以及来自微软、三星、地平线、百度、博世等全球知名企业高管,核心团队在物理 AI 方向兼具业内领先的研究能力和大规模的产业落地经验。
极佳视界是国内第一家布局世界模型的科技公司,以世界模型平台 GigaWorld、通用具身大脑 GigaBrain、原生本体 Maker 构建闭环生态,致力实现 10-100 倍以上的数据、训练、测试全链路效率提升,推动通用具身智能机器人、通用自动驾驶等物理 AGI 大规模爆发。

游乐网为非赢利性网站,所展示的游戏/软件/文章内容均来自于互联网或第三方用户上传分享,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系youleyoucom@outlook.com。
 同类文章
同类文章

Video-MME团队推出最严格AI视频理解评测基准
看视频时,我们的大脑几乎在同步处理多项任务:识别画面中的物体、理清动作的先后顺序、揣摩人物情绪、推断事件的前因后果。这个过程对我们来说轻松自然,但对人工智能而言,却是一座难以逾越的高峰。近期,由多个研究机构组成的Video-MME团队发布了一项关键研究,他们构建了一套名为Video-MME-v2的全

电子科技大学团队研发AI智能体实现游戏内举一反三学习
这项由电子科技大学牵头,联合韩国科学技术院、香港理工大学和庆熙大学共同完成的前沿研究,已于2026年4月正式发布于国际知名的ArXiv预印本平台,论文编号为arXiv:2604 05533v1。对于希望深入了解AI智能体迁移学习技术细节的读者,可以通过此编号查阅完整的学术论文。 熟悉《我的世界》(M

阿里巴巴团队攻克AI学术图表绘制难题实现论文配图自动生成
2025年3月31日,一项由阿里巴巴通义实验室联合上海交通大学、复旦大学、中国科学技术大学、东南大学及香港大学共同完成的重磅研究,在预印本平台arXiv上正式发布(论文编号:2603 28068v2)。该研究团队构建了一个名为AIBench的全新评估基准,其核心目标直指人工智能领域的一个前沿挑战:如

Illuin科技揭示AI搜索引擎偏见问题突破性发现
你是否曾在使用AI搜索工具时感到困惑:为什么那些内容冗长、信息分散的文章总是排在搜索结果前列,而那些结构清晰、信息密度高的优质内容却难以被找到?这并非偶然现象,而是揭示了当前AI搜索技术中一个亟待关注的核心问题。 法国Illuin Technology公司近期的一项突破性研究,系统性地揭示了先进AI

沙特KAUST团队攻克AI视觉识别难题让机器学会认人而非认景
看到一张照片,我们人类能轻松分辨出画面中的人或物,哪怕背景天差地别。但你可能想不到,如今最顶尖的AI视觉系统,却常常犯下“张冠李戴”的错误——它们往往更依赖背景环境,而不是识别对象本身来做判断。这就好比一个人总是通过房间的装修来认人,而不是看脸,结果自然是只要房间一样,就认定是同一个人。 最近,一项








- 日榜
- 周榜
- 月榜
 1
1
 2
2
 3
3
 4
5
6
7
8
9
10
相关攻略
4
5
6
7
8
9
10
相关攻略
 2015-03-10 11:25
2015-03-10 11:05
2021-08-04 13:30
2015-03-10 11:22
2015-03-10 12:39
2022-05-16 18:57
2025-05-23 13:43
2025-05-23 14:01
热门教程
2015-03-10 11:25
2015-03-10 11:05
2021-08-04 13:30
2015-03-10 11:22
2015-03-10 12:39
2022-05-16 18:57
2025-05-23 13:43
2025-05-23 14:01
热门教程
- 游戏攻略
- 安卓教程
- 苹果教程
- 电脑教程































 热门话题
热门话题
