




OpenClaw机器人上岗:AI帮你订外卖还能跑腿取件

过去几年间,AI 主要停留在屏幕内,用于文字对话、内容生成或自动化脚本执行;但近日,随着 OpenClaw 生态的爆发式增长,两个依托于此的开源项目让智能体与物理世界之间的壁垒开始消融,这则振奋人心
过去几年间,AI 主要停留在屏幕内,用于文字对话、内容生成或自动化脚本执行;但近日,随着 OpenClaw 生态的爆发式增长,两个依托于此的开源项目让智能体与物理世界之间的壁垒开始消融,这则振奋人心的消息,迅速点燃了全球机器人与 AI 社区的热情。
2 月 23 日,在美国旧金山举办的 SF OpenClaw Hackathon 上,一个名为 ROSClaw 的项目拿到了冠军。Irvin 团队搭建了一个桥接层,把当下最火的开源 AI Agent 平台 OpenClaw 直接连到了真实的机器人硬件上。夺冠之后,团队随即宣布将其开源。

(来源:X@irvinxyz)
具体来看,他们通过智能插件层将 OpenClaw 连接到机器人操作系统(ROS 2),借助网页实时通信技术(WebRTC)低延迟、安全连接的特性,实现了在全球任意地点远程连接并控制 ROS 兼容机器人。AI 代理可通过摄像头和传感器读取信息,并在真实世界中驱动机器人抓取与移动物体。
OpenClaw 本身是一款开源的自主 AI Agent 平台,允许开发者在本地运行、连接各种语言模型,实现自动化任务、消息应用集成等功能。它在发布后的短时间内便吸引了大量关注,在 GitHub 上获得超过二十万星标。
ROSClaw 的出现则补齐了 OpenClaw 在具身智能方向的关键一环,使其不仅可在数字空间执行自动化任务,还能通过智能硬件真正感知与操作物理环境。
Irvin 在帖子中直言:“代理逃出屏幕了!”团队在 GitHub 仓库中也明确描述:你在 Telegram、WhatsApp、Discord 或 Slack 上发一条消息,机器人就会行动起来。
与此同时,由 Menlo Research 社区推动的 Asimov 项目宣布:其研发的人形机器人 Asimov v1 即将开源完整身体设计图、仿真文件,以及执行器清单和可自由修改的零件列表。项目发布者表示,这个开放设计提供了“完整搭建、修改和训练自己人形机器人的所有必要资源”。
(来源:X@asimovinc)
知名机器人专家克里斯·帕克斯顿(Chris Paxton)随即回复:“这看起来太棒了!”同期,Asimov 还开放了腿部参考设计仓库 asimov-v0,并明确表示全身体设计即将跟进。
随后,Asimov 账号又直接发帖宣告:“你的 OpenClaw 代理可以拥有实体了。”帖子明确指出:你可以在该平台上为你的 AI 代理赋予机器人身体……Asimov 和 Menlo Research 都将参与其中。这直接将 Asimov 硬件与 OpenClaw 代理生态对接,形成闭环。
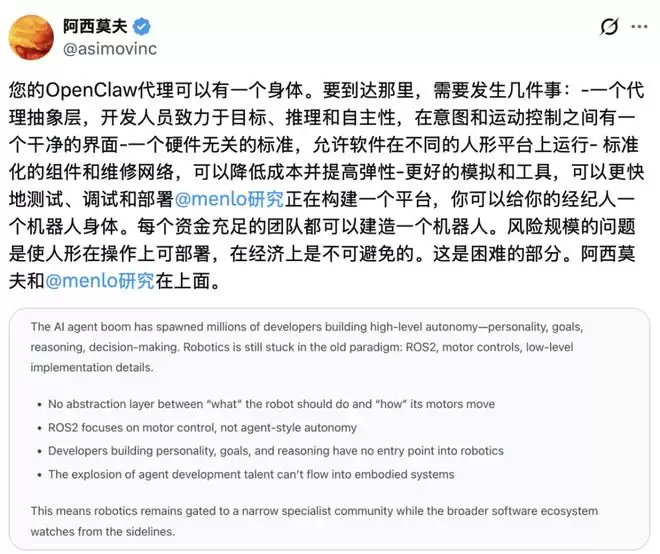
(来源:X@asimovinc)
在 Asimov 发布的连接帖中,团队系统阐述了实现目标所需的关键要素:
首先是一个代理抽象层:开发者可通过该层在目标、推理和自主性之间建立清晰接口,实现意图与运动控制的交互;其次是一种与硬件无关的通用标准:允许软件在不同人形机器人平台运行;
要想让这套系统变得更易用,还需要标准化组件和维修网络,以及更完善的仿真和工具,以此降低成本、提高韧性,同时高效完成前期测试、调试和部署等准备工作。
模块化、低成本、可复现的开源生态
Asimov 机器人的命名灵感来源于科幻小说作家艾萨克·阿西莫夫(Isaac Asimov),他在诸多作品中将机器人设想为人类的助手:如果精心设计,就可以为人类服务的机器。并提出了机器人三大定律,至今在现实世界中仍是机器人的基础行为准则框架:
机器人可能不会伤害人类,或者由于无所作为而使人类受到伤害。
机器人必须服从人类的命令,除非这些命令与第一定律相冲突。
机器人必须保护自己的存在,只要这种保护不与第一或第二定律相冲突。
Menlo Research 表示:我们以这种精神命名我们的参考人形机器人:一个增强人类能力而不是取代人类能力的机器人,它从头开始就具有安全性、可靠性和目的性。
根据 Menlo Research 正式和最新博客,Asimov 是一套完整的开源人形生态系统,由阿西莫夫操作系统(Asimov OS)、Asimov 人形机器人参考设计和开放供应链三大互连组件构成。
其中,Asimov OS 是一套运行在人形机器人上的操作系统,提供代理抽象层。代理用标准框架表达意图,操作系统负责处理电机、传感器、安全与遥测,不再依赖传统低级电机控制。Asimov 人形机器人参考设计将开源硬件蓝图,支持模块化组装,腿部、躯干、臂部、头部可独立开发并快速拼接。开放供应链将提供无门槛的组件制造商网络,目标是将人形机器人年化总拥有成本降至约 3 万美元。
博客披露,利用这套系统,仅需 100 天、研发支出不到 3 万美元(含机库、工具和零件更换),即可从零构建完整的人形腿部,实现行走能力。
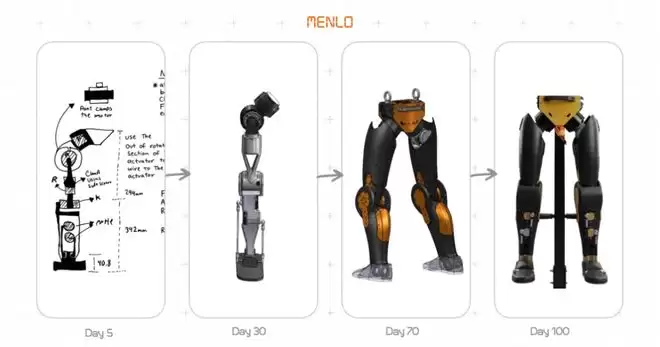
(来源:Menlo Blog)
此外,模块化设计让不同实验室得以专注于子系统构建,在全球任何地方均可低成本复现。理想情况下,Asimov v1 的每条腿拥有 6 个自由度,全身体自由度约为 26,最小高度 1.2 米,整机重量预计低于 40kg,低量产制造成本低于 2 万美元。
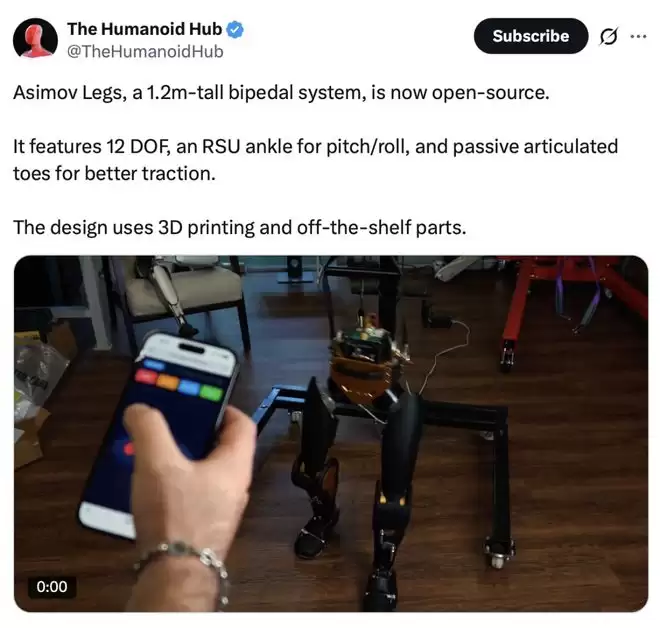
(来源:X@TheHumanoidHub)
对于 Asimov 而言,前文提及的 ROSClaw 直接补齐了软件侧。二者结合后,开发者可直接在 Menlo Stack 中完成从代理(代理开发者在标准框架中构建代理,该代理是自治有效载荷)、技能(代理通过现实世界的数据学习运动技能,例如洗碗、跳舞、物体操纵)、仿真(代理在数字孪生环境中运行,在物理部署前验证行为)到部署(通过单个配置步骤将代理赋予机器人实体)、遥测(实时反馈让代理能够快速迭代优化)的闭环迭代。
从“大厂专属”到“人人可造”
以往,人形机器人研发门槛极高,只有资金雄厚的团队才能触及。而 Asimov v1 + ROSClaw 的开源组合,直接把“造机器人”的门槛拉低到“大众消费”水平:仅需下载 GitHub 文件、根据物料清单采购零件、用 3D 打印或数控机床加工,即可组装、修改、训练属于自己的具身 AI。
(来源:X@asimovinc)
值得一提的是,Menlo Research 的明确目标是打造增强人类能力的劳动力平台。从起步阶段,Asimov 机器人就以“公开构建”的方式推进,目前已开源了其双腿模块设计和仿真文件,并在 Discord 社区中持续更新进展。
开发者还可以通过公开仓库和交流渠道分享关节设计、控制架构和训练策略,预计今年年内,这个项目就可以在“群策群力”之下搭建出完整机身框架。
在机器人研究领域,具身智能一直被认为是当下 AI 发展的重要方向:只有当 AI 能够在现实世界感知、行动,并与环境动态互动时,其判断与行动能力才趋于成熟。ROSClaw 和 Asimov 项目的联合出现,无疑代表了这一体系化构建的雏形:硬件开源提供身体,平台提供标准化接口,桥接工具让代理真正上身。
值得注意的是,这些开源动态仍处于早期范式探索阶段。ROSClaw 虽然为 OpenClaw 带来了物理世界的访问能力,但其稳定性、可扩展应用和真实物理任务执行能力仍有待考验;OpenClaw 在社区中也有不少关于安全性、易用性和经济性方面的讨论和批评。而 Asimov 的人形机器人设计同样面对硬件制造、仿真与现实间的“模拟到现实”(sim-to-real)差异等深层挑战。
当数字智能开始反向接入物理世界,这一趋势将可能重塑未来机器人、自主系统与人类社会协作的边界。开发者们,准备好为你的 AI 代理“造一副身体”了吗?
参考资料:
https://x.com/asimovinc/status/2027564343639085239
https://x.com/irvinxyz/status/2025784961773846548
https://x.com/asimovinc/status/2028311401090154808
https://menlo.ai/products/asimov
https://menlo.ai/blog/humanoid-legs-100-days
https://github.com/asimovinc/asimov-v0
https://github.com/PlaiPin/rosclaw
运营/排版:何晨龙

游乐网为非赢利性网站,所展示的游戏/软件/文章内容均来自于互联网或第三方用户上传分享,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系youleyoucom@outlook.com。
 同类文章
同类文章

地下室发现尘封12年AMD前CEO旧PC苏姿丰签名推土机硬件
一位技工在客户家地下室发现一台属于AMD前CEORoryRead的旧PC,机箱上留有苏姿丰等高管签名,配置为推土机时代硬件且从未开机。这台电脑封存了AMD从推土机失败到Zen架构崛起的关键转折历史。

Laravel 12生态成熟助力全栈开发效率提升
Laravel12延续开发体验优势,在项目结构、查询构建、API开发、调试及性能上持续优化。其生态日趋成熟,形成Reverb、Pulse等完整工具链,覆盖API、SaaS、企业后台及AI应用开发。与Next js的组合逐渐流行,Laravel已演变为现代Web开发平台,保持社区活力。

Linux内核持续演进:Rust语言与零拷贝网络成新焦点
LinuxKernel6 15重大更新:Rust驱动正式入主线,NOVADRM成为首个实践案例;io_uring新增零拷贝网络接收,降低CPU开销与延迟;Btrfs增强实时zstd压缩、DirectIO及稳定性。内核同步推进安全化与高性能网络化。

谷歌Gemini进入Agent时代 打造全天候AI助理
Google推出GeminiSpark、Omni等新功能。Spark可全天候在后台运行,主动处理邮件、日历等任务;Omni侧重视频理解与环境推理,布局世界模型。AI正从被动回答转向主动观察、规划与执行,标志着竞赛进入新阶段。

CPU-Z 2.20.2正式版发布 支持Intel三大平台及AMD锐龙AI Max
CPU-Z2 20 2正式版发布,新增支持IntelPantherLake、WildcatLake、BartlettLake三大架构及AMD锐龙AIMax、Pro系列,加入锐炫G3识别库,修复缓存错误和锐龙77700X3D检测问题,免费下载。








- 热门数据榜



 相关攻略
相关攻略
 2026-07-10 10:06
2026-07-10 10:06
2026-07-10 10:06
2026-07-10 10:05
2026-07-10 10:05
2026-07-10 10:05
2026-07-10 10:05
2026-07-10 10:05
热门教程
2026-07-10 10:06
2026-07-10 10:06
2026-07-10 10:06
2026-07-10 10:05
2026-07-10 10:05
2026-07-10 10:05
2026-07-10 10:05
2026-07-10 10:05
热门教程
- 游戏攻略
- 安卓教程
- 苹果教程
- 电脑教程
















