




高德首款机器狗亮相亦庄机器人马拉松 ABot-Claw重新定义具身机器人的世界记忆

高德途途亮相:全球首款开放环境全自主具身机器人完成马拉松导盲挑战
就在近日的2026北京亦庄机器人半程马拉松上,发生了一件足以载入技术史册的实战演示。阿里巴巴旗下高德正式揭晓了其全球首款开放环境全自主具身机器人——“高德途途”。这款四足机器人并非在实验室里“走秀”,而是在真实、动态的马拉松赛道上,成功协助视障人士完成了复杂避障、人群穿行等一系列高难度挑战。

途途能够应对导盲这类严苛场景,其底层依托是一个更为宏大的技术体系:高德全新发布的ABot全栈具身技术体系。这个体系的厉害之处在于,它基于上万种真实场景与千万级多模态Clip数据,将高德多年来沉淀的海量空间智能资产,高效转化为了训练机器人的核心“养料”。可以说,这标志着全球首个真正面向AGI(通用人工智能)目标构建的全栈具身技术体系已经落地。
与行业内常见的“单点拼凑、封闭验证”的碎片化路径不同,ABot体系从架构上就实现了突破。它以AGI为核心目标,首次将数据引擎、基座模型与执行中枢深度耦合为一个统一系统。这种系统性的优势已经得到验证:目前,高德ABot系列模型已经在全球15项权威基准测试中拿到了SOTA(领先水平)成绩。
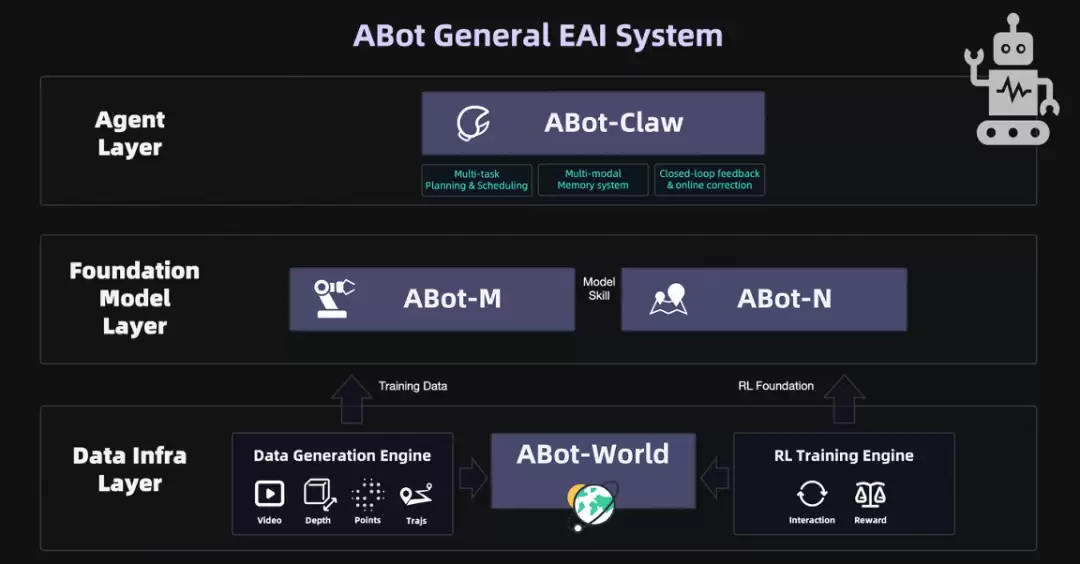
ABot体系:三层飞轮式设计,构建持续进化的具身智能闭环
ABot体系的核心设计哲学是“闭环飞轮”。它涵盖数据、模型、应用三层,但这三层并非简单的堆叠,而是深度咬合、互为引擎。具体来说,就是“数据驱动模型、模型服务应用、应用反哺数据”。这套机制精准地击穿了当前行业普遍面临的三大瓶颈:数据稀缺、仿真鸿沟与技能泛化,从而形成了一个能够持续自我进化的完整技术闭环。
数据是具身智能的核心“燃料”,直接决定了其泛化能力的天花板。但问题在于,不同于大语言模型可以爬取海量文本,传统依靠真机采集机器人数据的方式,成本呈指数级攀升,难以规模化。
作为数据层的核心解决方案,ABot-World应运而生。它通过批量合成视频、深度、点云、轨迹四类关键训练数据,并配合强化学习训练引擎在虚拟环境中定义奖惩、反复试错。这套方法的核心是以高保真仿真替代高昂的真机采集,从而有效弥合“仿真到现实”的鸿沟,将数据成本压缩数个数量级。
模型层则重点解决两大难题:具身操作的通用性和导航的长程性。其核心是感知与决策的分工与协同。其中,ABot-M专精于精细操作(“手”),ABot-N则负责长程导航(“腿”)。两个模型分工训练,再通过创新的“模型技能”机制进行组合调用,从而协同完成那些需要“走很远、干细活”的复杂任务。
应用层的核心是具身版的“调度中枢”——ABot-Claw。它通过将异构机器人统一于一个共享的认知框架之下,打造出具备智能调度、持久记忆、分层控制与社会对齐能力的“执行大脑”。这有效解决了长程任务闭环难、知识无法在不同机器人间共享等行业痛点。
值得一提的是,ABot体系的这一设计逻辑,直接沿袭自高德已被验证成功的“空间智能飞轮”:依托近10亿月活场景产生的海量时空数据与实时反馈,算法在闭环中持续迭代,推动模型对物理世界的认知不断加深。这个飞轮每日都在真实世界中自动演进。从根本上说,这界定了高德的体系化优势:它不依赖于某个单点技术的偶然突破,而是依靠整个飞轮在真实场景中持续运转的“转速”来构建护城河。
ABot-World:在物理合规性、动作可控性、零样本泛化三大维度均达SOTA
当主流的世界模型仍受困于“视觉幻觉”与动力学脱节时,ABot-World率先取得了突破。它成为全球首个将物理定律深度嵌入生成全流程的可微分、可进化动力学引擎。作为ABot体系的底层仿真基座,它的性能直接决定了上层模型对物理世界的一致性理解和泛化能力上限。正是以这个引擎为核心,ABot体系才得以彻底打通“虚拟训练-真实部署”的闭环。
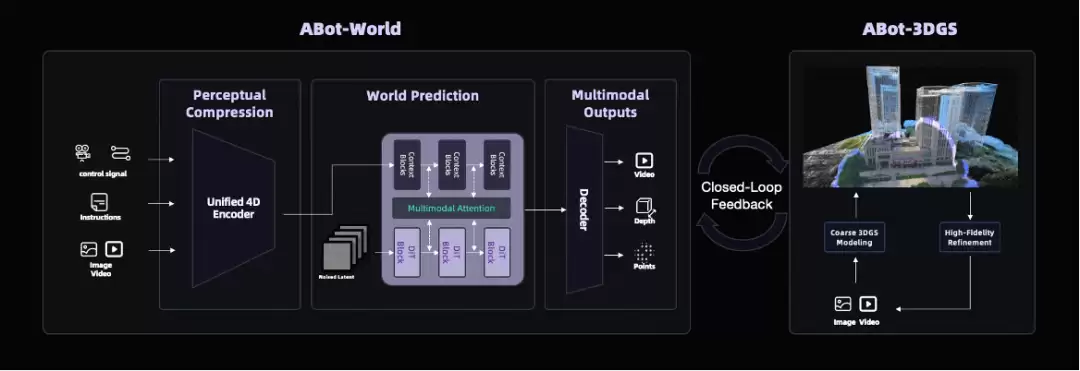
在架构上,ABot-World专为具身智能设计了14B参数的DiT架构。它以机器人的观测与动作为输入,直接在潜空间生成符合时空动力学规律的未来状态序列。同时,基于千万级真实数据与多层级采样治理,它成功突破了单一任务模型的泛化制约。
在场景构建上,其3DGS冷启动空间基座面向手机拍摄、航测图等稀疏输入,通过“粗建模、高保真修复再到蒸馏回环”的自动化流程,能将低质量视频转化为高质量3D场景,这大幅拉低了高质量数据获取的成本门槛。
训练方面,模型首创了Diffusion-DPO物理偏好对齐框架。该框架由视觉语言模型生成物理规则清单并进行独立判别,从而构建优劣样本对,驱动模型主动抑制那些违反物理规律的行为。同时,拉格朗日动力学与3DGS重建技术的融合,使得系统生成的每一帧画面,都不再是简单的图像,而是包含了质量、摩擦、接触力等丰富物理属性的可微分“快照”。
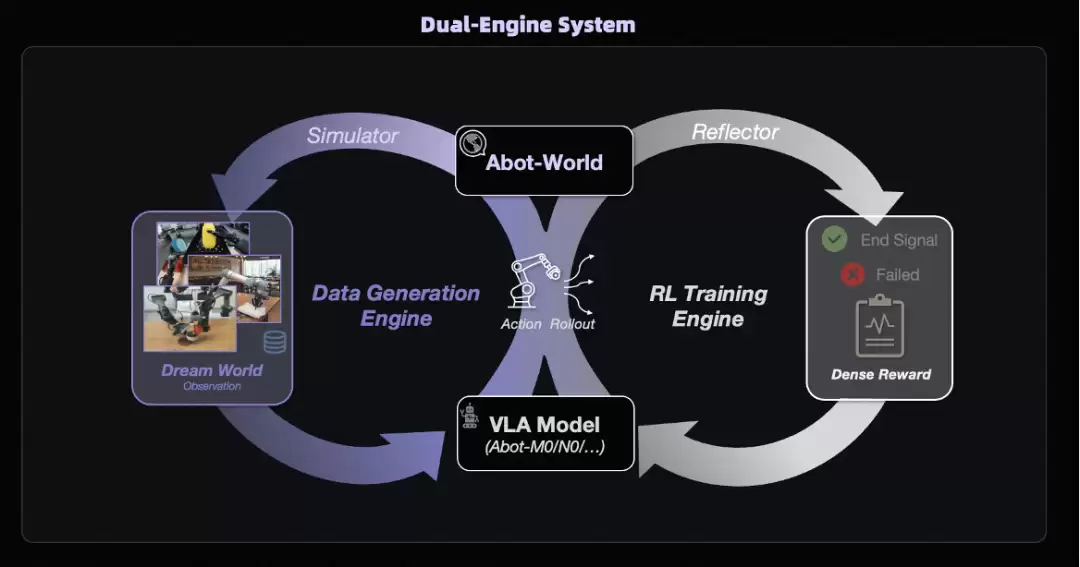
除此之外,ABot-World还构建了“训练+数据”双引擎并行的架构,实现了模型的自进化。依托高德自有地图与脱敏数据,结合3DGS技术实现厘米级重建与光照一致性,该系统已累计生产了上万级3D真实场景、百万级推理数据与千万级训练轨迹,覆盖了99%的典型生活场景。通过接入视觉语言-动作闭环,模型实现了“预测即训练,演练即学习”的持续进化能力,并经由跨形态动作映射,统一支持对多种机械形态的精确控制。
在PBench、EZSbench、WorldArena、Agibot World Challenge等主流评测中,ABot-World持续保持领先,并成为唯一在物理合规性、动作可控性、零样本泛化三大关键维度均达到SOTA水平的模型。

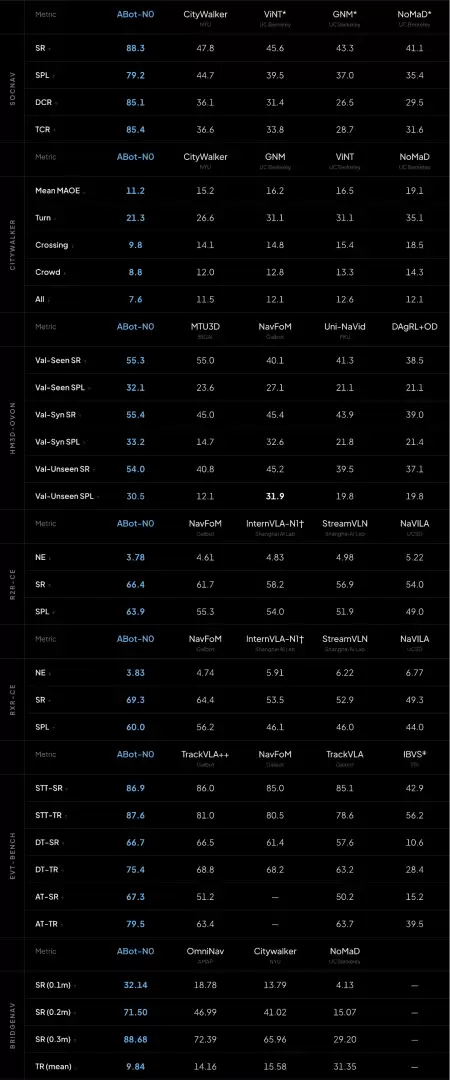
ABot-N & ABot-M:ABot体系的“运动双核”,跨本体导航与操作基座斩获11项SOTA
若将ABot全栈体系视为具身智能的“运行大脑”,那么ABot-N与ABot-M便是其“运动双核”。它们分别掌管机器人的“双腿”与“双手”,直接响应物理世界中“去哪里”与“做什么”的基础指令。依托统一架构设计,高德打造出了既可解耦又能协同的专用基座模型,从而突破了跨形态适配与跨任务泛化的技术瓶颈。
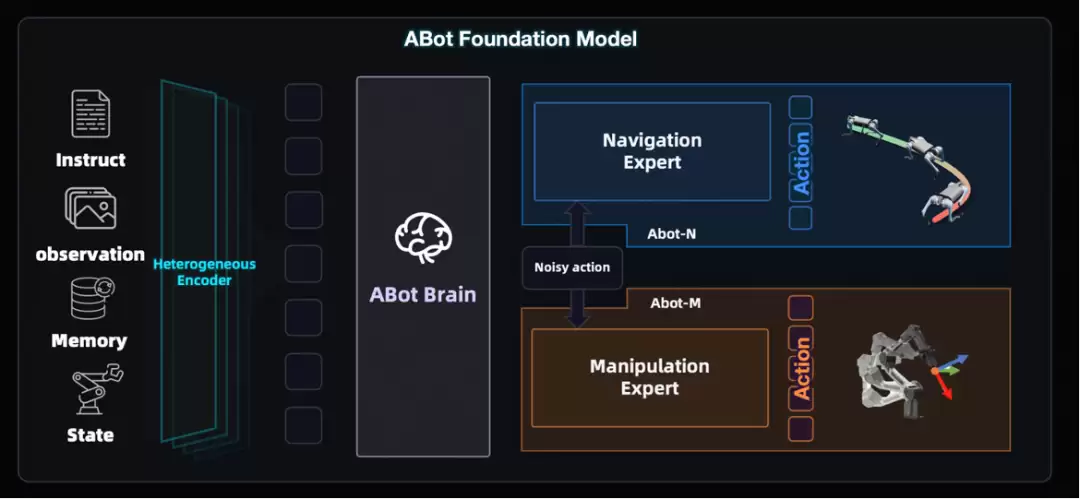
作为全球首个实现五大核心导航任务“大一统”的视觉语言-动作基座模型,ABot-N具备了深度的意图理解、自主决策与持续进化能力,是途途能在开放世界中自由行走的核心导航引擎。它采用层级式的“大脑-动作”架构,通过多模块协同,实现了单一模型对多种导航任务的全覆盖,打破了传统专用架构的泛化天花板。
ABot-N推出后,迅速在VLN-CE(R2R/RxR)、HM3D-OVON、EVT-Bench等7大权威基准上全面刷新SOTA,并在导航精度、社会合规性、零样本泛化能力上实现了断层式领先。
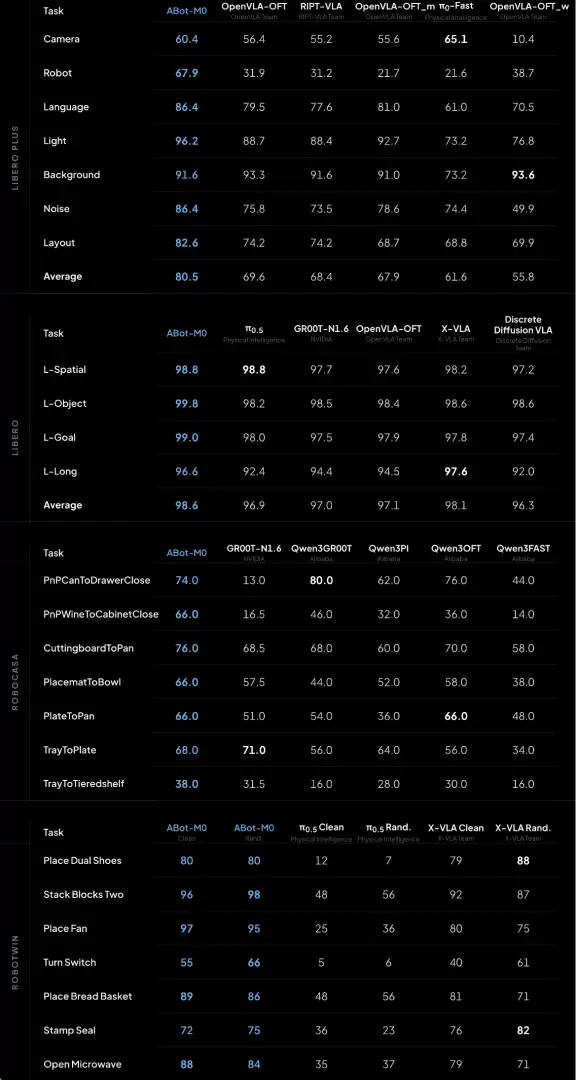
ABot-M则是全球首个采用统一架构的具身操作基座模型。其最大价值在于,能用同一个“通用大脑”适配多种形态的机器人,从而大幅提升操作模型在异构机器人形态和多样化任务场景下的泛化能力。
技术上,ABot-M提出了全球首个动作流形学习方法,将学习目标由传统的去噪重构转变为流形投影,这显著提升了动作生成的稳定性与解码效率,使其在高自由度全身控制等复杂场景中展现出更强的可扩展性。在感知端,它采用语义流和动作流双流并行的架构,有效提升了精细操作的执行精度。
在LIBERO、LIBERO-Plus、RoboCasa GRRoboTwin 2.0等主流评测中,ABot-M全面超越了π0.5、UniVLA、OpenVLA-OFT等强劲基线模型,在泛化能力、鲁棒性与跨形态迁移三个维度实现了系统性领先。
不仅如此,ABot-N与ABot-M的相关多项子成果,已入选ICLR、CVPR等顶级学术会议,成为机器人导航与操作领域在精确性、高效性与安全性方面的范式参考。
ABot-Claw:首创“Map as Memory”的通用集中式Harness架构
记忆,是机器人跨越认知与执行之间鸿沟的底层基石。传统机器视觉受限于“视野之外即荒原”,记忆呈碎片化分布,严重制约了其泛化能力。
为突破这一根本性瓶颈,ABot-Claw首创了“Map as Memory”(地图即记忆)理念,重构了具身智能的记忆机制。作为ABot体系的“执行中枢”,ABot-Claw采用集中式Harness架构,将高德地图与用户私有地图设为全局认知的锚点,把多模态感知数据统一映射至一个共享的语义空间,从而形成可动态刷新、持久沉淀的“世界记忆”。新的机器人终端接入后,仅需读取这份全局上下文,即可零成本继承所有环境认知,彻底粉碎了场景孤岛。
另外,ABot-Claw采用“云端大脑—边缘响应”的两级设计,兼顾了智能的深度与执行的实时可靠性。在调度层面,该架构还支持多种异构机器人的并行协作与任务接力,当某个机器人发生故障时,任务可自动由其他机器人接续,实现了任务上下文的无缝移交与跨形态协作。这标志着机器人系统正从“单体智能”向“体系智能”演进,机器人不再是孤立个体,而是共享记忆、统一调度、协同进化的智能网络节点。
ABot-Claw还首创了闭环反馈与纠错机制,在模糊指令理解、跨机导引等复杂场景中,充分验证了其系统的鲁棒性与泛化性。
伴随高德途途的全球首秀,高德同步宣布将开源ABot全体系。此举不仅是对其“AMAP AI Inside”核心理念的深度践行,更可能重塑整个具身智能领域的研发范式,为AGI时代的全面到来按下加速键。

游乐网为非赢利性网站,所展示的游戏/软件/文章内容均来自于互联网或第三方用户上传分享,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系youleyoucom@outlook.com。
 同类文章
同类文章

年电池续航最长的荣耀手机别错过
在挑选2026年电池续航最长的手机时,许多人关注的不仅仅是实验室测试中的几分钟优势,更看重一天高强度使用后还能剩下多少电量。按照这个标准来看,荣耀X80 Pro Max确实很有代表性,它将大容量电池与真实日常场景紧密结合,是该需求下非常值得优先考虑的一款机型。荣耀X80 Pro Max直接搭载了一块

年高性价比手机推荐 同预算选机更看重长期体验
在2026年性价比高的手机推荐榜单中,同价位机型往往更看重长期使用的综合体验。如果仅仅追求低价,很容易忽视续航、耐用性、屏幕素质与通信质量这些日常高频使用的核心维度。荣耀X80 Pro Max的主要竞争力,在于将11000mAh超大电池、军工级防护、万级亮度屏幕以及AI智能体验,全部集成到2000元

小米17系列销量超550万台 Ultra版约23.07万部
探讨小米17系列最新销量表现。据数码博主曝光的行业追踪数据,截至2026年第26周(即6月22日至6月28日),小米17系列全系累计销量已成功突破550万台大关。 具体数据方面,系列总销量约为554 01万台。其中,定位顶配的小米17 Ultra贡献了约23 07万部。值得关注的是,面向中端市场的1

年12月新能源SUV销量榜 Model Y夺冠
2025年12月新能源SUV销量公布,特斯拉ModelY以65874辆居首,同比增长6 5%。小米YU7上市即热销,39089辆获亚军。方程豹钛7以34086辆位列第三。前十中自主品牌占九席,问界M7同比飙升118 9%。市场格局改变,自主品牌强势崛起,竞争激烈,数据亮眼。

科学家跨越死亡之谷架起生命桥梁
基础科学研究的魅力,在于它常常从最不起眼的问题出发,最终改写整个学科的认知版图。这句话,在上海张江的中国科学院生物与化学交叉研究中心,得到了最好的印证。 7月6日,“活力中国调研行”走进这座实验室。一个下午,浓缩的是一场由顶尖科学家带来的“从0到1”基础研究课——密集、深邃,直击问题核心。 先从袁钧








- 日榜
- 周榜
- 月榜



 相关攻略
相关攻略
 2026-07-07 12:52
2026-07-07 12:52
2026-07-07 12:52
2026-07-07 12:52
2026-07-07 12:52
2026-07-07 12:52
2026-07-07 12:51
2026-07-07 12:51
热门教程
2026-07-07 12:52
2026-07-07 12:52
2026-07-07 12:52
2026-07-07 12:52
2026-07-07 12:52
2026-07-07 12:52
2026-07-07 12:51
2026-07-07 12:51
热门教程
- 游戏攻略
- 安卓教程
- 苹果教程
- 电脑教程















 热门话题
热门话题
