




击败PI!星动纪元登顶具身奥林匹克,狂揽三项全球冠军

人工智能与机器人领域的反直觉现象
在人工智能和机器人领域,一直存在一个颇为反直觉的现象:那些对人类而言复杂、需要深思熟虑的任务,机器往往能轻松应对;而人类几乎不假思索就能完成的感知与运动技能,让机器来复现却异常艰难。
免费影视、动漫、音乐、游戏、小说资源长期稳定更新! 👉 点此立即查看 👈
想想看,AlphaGo可以击败世界围棋冠军,但如果把它塞进一个机器人的身体里,它可能连一只猫都抓不住。大语言模型能破解国际数学奥林匹克竞赛的难题,却无法驱动一只机械手,稳稳地捏起一支笔并写下答案。
这种人类预期与机器实际能力之间的错位,就是著名的“莫拉维克悖论”。它直指当前AI发展的核心痛点:抽象思维易得,具身体验难求。
正是出于对现有世界人形机器人大赛的“些许失望”,前谷歌资深机器人专家Benjie Holson以自己的名字创办了“Benjie‘s Olympics”,向全球的机器人专家们发出了一份硬核挑战。
在这个“具身灵巧操作奥林匹克”的赛场上,机器人需要挑战15项任务,从抹花生酱、清洗油腻的平底锅,到插钥匙开锁、把袜子翻过来——全是人类日常生活中最稀松平常的动作。
而这些,恰恰是莫拉维克悖论中,机器最难处理的典型场景。有参赛团队耗费六个月打磨的演示,在任务挑战中遭遇“滑铁卢”,三天内失败率高达90%,足见赛事的严苛与残酷。
这15项任务归属于5个大类:开门、洗衣、基本工具使用、指尖操作、湿滑路面行走。每个大类下各有3个任务,依据难度不同,对应金、银、铜牌。规则很直接:只有在单项任务中取得第一,才能摘得对应的奖牌。
在一轮轮硬碰硬的较量中,来自中国的具身智能公司星动纪元,一举斩获三项任务的全球第一,其中包括两项金牌难度任务和一项银牌难度任务。

在剥橘子、开锁、翻袜子任务中,其表现全面超越了美国明星具身智能公司Physical Intelligence(简称PI),刷新了世界纪录。
这里需要特别说明的是,PI在其他比赛中多以“被挑战者”的身份出现——别人用它的开源模型去参赛。但Benjie’s Olympics是PI目前唯一主动参加的比赛,并且使用的是代表其最高水平的闭源模型。星动纪元不仅是该赛事目前唯一上榜的中国具身企业,也是唯一一个在此赛中击败了PI闭源模型的玩家。
终极真实压力测试
与那些流程繁琐、包装华丽的正式机器人大赛不同,Benjie’s Olympics以其纯粹到极致的实操能力对决,吸引了全球顶尖具身智能公司的目光。《科学美国人》杂志对其评价可谓一针见血,称其为“物理智能的终极真实压力测试”:
“Demo死在这里,实用机器人从这里诞生。”
这项赛事的核心特质在于强制泛化,而非机械复现。它不考察机器人在固定场景下的重复表演,只检验其在真实、复杂、多变环境中的自适应与自主决策能力。换句话说,只有真正具备强大泛化能力和触觉智能的系统,才能在这里存活下来。
首个在赛事中获得多枚金牌的PI团队曾给出这样的评价:
“每个任务都瞄准了具身智能领域最难啃的骨头:柔性物体操作、高接触密度的灵巧操控、长时序的自主规划。没有其他比赛能与之比肩。”
别看只有15个项目,比赛规则却极其严苛:要求全自主运行,开始后禁止遥控、人工介入或远程修正;禁止使用仿真环境,必须在真实家庭场景下操作,保证真实的光照、纹理、摩擦和噪声;环境随机、物体随意摆放,不可粘贴任何标记,也不可预先扫描地图。这完全就是一场“闭卷裸考”。
甚至,赛事创办人Benjie Holson对于是否允许“手臂固定在桌面上”的机器人参赛都拿不准,最终将决定权交给了网友投票。结果显而易见:只允许可移动的机器人参赛。这意味着,难度又提升了一个量级。
在奖牌等级的设置上,Benjie’s Olympics自有一套逻辑。例如在“洗衣”大类中:“将T恤衫里外翻转并折叠”是铜牌难度;“把袜子翻过来”是银牌难度;而“挂好一件男士衬衫”则能达到金牌难度。再比如对“指尖”灵巧度的考验:“卷起一双配对的袜子”是铜牌;“使用狗粪袋捡起便便”是银牌;“徒手剥开一个橙子”则是金牌。
每个任务,Benjie Holson本人都亲自示范一遍。比赛还规定,只要参赛者的成绩比上一任冠军至少提高25%,即可获得对应奖牌。看过这15个任务的机器人专家普遍认为,多数队伍连铜牌关卡都难以通过。

以剥橙子为例,这个人类无需工具即可完成的动作,对机器人却异常棘手。橘子果皮易破、果肉易碎,任务难点在于要求机器人精准区分果皮与果肉极其细微的视觉特征,并实时跟踪剥制过程中果皮的形变,对视觉感知的鲁棒性要求极高。
再看开锁,同样是金牌难度任务。钥匙孔是毫米级的微小目标,要求机器人精准识别其位置和角度,同时理解钥匙的姿态,实现毫米级的精准对准,还需克服光照变化、金属反光、视角偏差等多重干扰,无疑是对机器人精细操作与空间感知能力的双重极限挑战。
而这两项金牌难度任务,星动纪元均打破了纪录,夺得第一。

在剥橙子任务中,此前PI团队借助削皮刀工具,用时2分46秒完成;而星动纪元实现了纯手剥,仅用1分47秒,速度提升35%。他们也因此成为赛事中首个实现完全无工具徒手剥橙子的团队。
在开锁任务中,PI团队用时66秒;星动纪元仅用49秒,速度提升25%。
在银牌难度任务“翻袜子”中,星动纪元同样战胜了PI。翻袜子是检验模型家庭场景泛化能力的核心标杆,属于柔性物体操作、样本效率与泛化能力的典型挑战。袜子翻转过程会产生复杂且无规律的形变,要求机器人实时跟踪形变,精准区分袜子的内外侧和开口位置,对视觉感知和柔性物体跟踪能力要求极高。PI使用了176个训练样本,用时1分33秒完成;星动纪元仅用了120个样本,不仅样本量减少了32%,翻袜子速度也比PI提升了30%。
Benjie’s Olympics 公布星动纪元银牌任务(翻袜子)第一
在这三项任务中,星动纪元均位列全球第一,并创造了新的世界纪录。
全靠自研VLA具身模型控场
能在如此严苛的赛事中取得佳绩,绝非运气使然,其背后全自研的VLA(视觉-语言-动作)具身大模型功不可没。该模型具备三个关键优势,个个都能在实战中派上大用场。
第一个优势,是强大的基础模型知识迁移能力,让机器人“学东西”事半功倍。传统具身智能模型严重依赖海量场景数据训练,泛化能力有限。这就好比教一个孩子认识苹果,可能需要给他看上万张不同角度、光照的苹果图片。而星动纪元的思路是,先让模型理解更高层的概念,比如“水果”的共性,再迁移到识别具体的苹果、橘子,从而大幅优化数据利用效率。翻袜子任务就是明证:仅用120组训练样本,效果就超越了使用176组样本的对手。这意味着机器人能更快适应新场景,研发成本和时间都得以大幅降低。
第二个优势,是让机器人“看得更清”,尤其是在处理微小目标时。移动机器人的摄像头会随着底盘运动而晃动,传统方法在靠近目标时容易因视角、距离变化而“看花眼”。星动纪元的模型引入了自适应视觉注意力机制,原理很直观:自动聚焦于钥匙、锁孔、果皮边缘等细小关键特征,即使环境杂乱或机身轻微晃动,也能实现精准、稳定的识别。
第三个优势,是让机器人“反应更快,下手更稳”。传统模型常采用“执行一步,规划下一步”的串行方式,单次轨迹生成耗时可能超过1秒,导致响应慢、误差易累积。例如,翻袜子时袜子突然变形,等机器人“想”好下一步,袜子可能已经滑落了。星动纪元采用了异步高频推理与短时域规划策略,能在当前运动轨迹尚未执行完毕时,就同步预测并生成下一段轨迹,实现“无缝切换”。
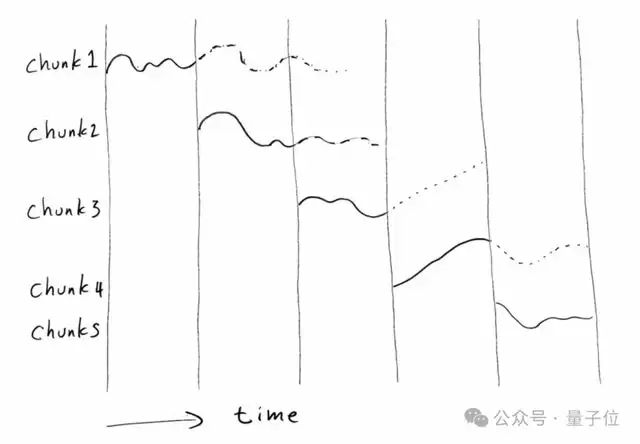
如图所示,机器人关节沿第一段路径运动,一旦第二段路径规划完成(图中垂直线处),便立即切换,依此类推。每条路径的最后一段实际上总会被提前规划的新路径所取代。简单说,机器人在做当前动作时,“大脑”已在预判接下来的几步。规划得越频繁,机器人的动作就越连贯、灵敏。因此在翻袜子这种需要实时应对形变的任务中,机器人能快速调整,一气呵成。
这三项技术改进叠加,产生了显著效果。星动纪元的机器人不仅视觉敏锐、操作灵巧,还能理解工具使用、实现双手协同,完成多步骤的长时序规划任务。正是这套全自研的VLA具身模型,让星动纪元在“只允许移动机器人参赛”的硬规则下,不仅没有处于劣势,反而将移动带来的动态不确定性,转化为了自身的技术护城河。
冠军团队,不止于赛事
这并非星动纪元首次在顶尖较量中脱颖而出。2025年10月,其创始人陈建宇与斯坦福大学Chelsea Finn(PI公司联合创始人)团队合作研发了Ctrl-World可控生成世界模型。该模型在全球具身智能顶级世界模型权威评测WorldArena榜单中,超越谷歌、英伟达等巨头,斩获具身任务全球第一。
2026年2月,双方再次联合提出VLAW框架,首次实现了VLA策略与动作条件世界模型的协同迭代优化。星动纪元也因此成为唯一与PI进行过两次深度合作的中国具身智能公司。
陈建宇对端到端VLA技术路线的坚持,从其履历可见一斑。2020年从加州大学伯克利分校博士毕业后,他回到母校清华大学,担任交叉信息研究院助理教授,28岁成为清华博导,并于2024年创办星动纪元。

2024年9月,星动纪元成为全球首个提出分频VLA技术的团队,走在了PI、Figure、Google、NVIDIA等公司的前面。同年12月,该公司发布了融合世界模型的VLA算法框架Video Prediction Policy(现已开源)。
2025年,星动纪元自研的ERA-42端到端VLA具身大模型,实现了对全尺寸双足人形机器人全身及五指灵巧手的精准控制,跻身全球仅有的四家具备此能力的公司之列。
技术的终极价值,在于实用。赛场之外,星动纪元的VLA具身大模型已在多个领域落地生根。在物流领域,与顺丰合作;在制造业,与吉利、北汽携手;在商业服务与家庭服务领域,则已与海尔、联想、世纪金源等企业达成合作。

例如,在今年中关村论坛亮相的智能分拣机器人,便是星动纪元“真能干活”的机器人代表。在日常作业中,它不仅能完成药品、日化品、包裹的分拣及扫码,还能执行“零部件抓取-高精度装配-质量检测”等制造业全流程任务。在商业服务场景,其机器人负责门店客座清洁、物品递送、导游导览等工作,部分场景效率目前已达到70%~80%。
星动纪元所做的事情,恰恰契合了Benjie’s Olympics赛事的初衷:让有用的机器人在这里诞生,让只停留在演示阶段的技术永远成为过去。当越来越多的行业参与者从技术炫技转向解决实际问题,便会发现,在机器人这场漫长的竞赛中,真正的对手从来不是其他玩家,而是那个对人类而言习以为常、对机器却依然充满挑战的物理世界。

游乐网为非赢利性网站,所展示的游戏/软件/文章内容均来自于互联网或第三方用户上传分享,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系youleyoucom@outlook.com。
 同类文章
同类文章

研究发现:同时使用过多 AI 工具实际上会降低工作效率,并导致“大脑疲劳”
警惕“AI脑疲劳”:多工具并行背后的效率陷阱 人工智能工具在提升工作效率方面的潜力有目共睹,但企业管理者们似乎需要踩一脚刹车,重新审视“越多越好”的堆叠式使用策略。过度依赖和同时调度多个AI工具,反而可能将员工推入一种新型的职业困局。 这一警示并非空xue来风,其根源来自《哈佛商业评论》近期发表的一

美的发布“三个一”战略及 MevoX 家居智能体,未来三年将投 600 亿深耕 AI 与具身智能等前沿领域
美的发布“三个一”战略及MevoX家居智能体,未来三年将投600亿深耕AI与具身智能等前沿领域 3月10日,以“智美万象”为主题的美的2026全屋智能战略发布会在上海举行。这次发布会,可以说为智能家居行业勾勒出了一幅相当清晰的未来图景。会上,美的正式亮出了其全屋智能的“三个一”战略、自进化家居智能体

曝腾讯正开发“绝密级”微信 AI 智能体:年中启动灰测,能操控全平台数百万小程序
曝腾讯正开发“绝密级”微信 AI 智能体:年中启动灰测,能操控全平台数百万小程序 一则来自《The Information》的报道,在行业里激起了不小的涟漪。根据他们3月10日的消息,腾讯内部似乎正在进行一项“绝密级”的AI智能体项目,而它的主战场,正是我们每天离不开的微信。 报道援引了四位知情人士

谷歌首个原生多模态嵌入模型 Gemini Embedding 2 发布:能让机器“理解”信息
谷歌发布首个原生多模态嵌入模型 Gemini Embedding 2:让机器真正“理解”多元信息 北京时间今天凌晨,谷歌扔出了一枚重磅技术冲击波——全新的 Gemini Embedding 2 模型正式发布。这可不是一次简单的迭代,它是谷歌首个原生的多模态嵌入模型。简单来说,从此以后,文字、图像、视

受 AI 及裁员等因素影响,2 月美国科技从业者信心再度下滑
3 月 11 日消息:美国员工信心再度下滑,科技行业“寒冬”持续 据《商业内幕》今日报道,美国职场情绪在年初并未迎来回暖。今年2月,员工对公司的信心指数再次掉头向下,而其中,科技从业者的悲观情绪显得尤为突出。 招聘与职场评价平台Glassdoor每月发布的员工信心指数,一直是观察职场情绪变化的温度计








- 日榜
- 周榜
- 月榜
 1
1
 2
2
 3
3
 4
5
6
7
8
9
10
相关攻略
4
5
6
7
8
9
10
相关攻略
 2015-03-10 11:25
2015-03-10 11:05
2021-08-04 13:30
2015-03-10 11:22
2015-03-10 12:39
2022-05-16 18:57
2025-05-23 13:43
2025-05-23 14:01
热门教程
2015-03-10 11:25
2015-03-10 11:05
2021-08-04 13:30
2015-03-10 11:22
2015-03-10 12:39
2022-05-16 18:57
2025-05-23 13:43
2025-05-23 14:01
热门教程
- 游戏攻略
- 安卓教程
- 苹果教程
- 电脑教程































 热门话题
热门话题
