




智能体如何在现实世界中实现生存与进化

第六届ATEC科技精英赛(ATEC2026)全球报名已于4月1日正式启动,这场聚焦人工智能与机器人前沿技术的国际顶级赛事正面向全球高校、科研机构及科技企业开放,诚邀各方精英团队同台竞技。
作为中国最具国际影响力的高端智能科技赛事之一,本届ATEC大赛由ATEC前沿科技探索社区联合香港中文大学、上海创智学院共同发起,并获得了清华大学、北京大学、复旦大学、香港科技大学以及蚂蚁集团等国内外顶尖学府与科技巨头的鼎力支持。赛事长期深耕人工智能、具身智能及网络安全等前沿领域,其核心宗旨始终围绕“真实世界极限挑战”,致力于推动前沿AI技术在复杂物理场景中的实际落地与突破性创新。

本届大赛主题定为“AI and Robotics Real-World Extreme Challenge(人工智能与机器人真实世界极限挑战)”,其考核重点在于全面、严苛地验证具身智能系统在真实物理世界中的综合性能与鲁棒性。

具身智能的“终极试炼场”:从演示走向实用
随着具身智能技术从概念走向实践,“从Demo演示迈向真实世界应用”已成为行业共识。然而,当前面临的核心瓶颈并非技术想象力,而是一套能够客观衡量系统实际能力的有效评估体系。
真实环境充满不确定性,任务无法穷尽,结果难以标准化——这些现实约束使得我们无法像评测大语言模型那样,仅凭一套基准测试(Benchmark)就简单判定系统优劣。这导致各类模型与演示层出不穷,但其真正的落地可行性与稳定性却无从判断。
因此,将完整的智能体系统置于真实复杂环境中进行“通关”测试,正成为业界公认最有效的检验方式。真实世界本身的复杂性、多样性与随机性,构成了最天然、也最严格的终极测试集。ATEC2026的核心价值,正是搭建了这样一个公开、公平的真实世界竞技场:在统一规则下,让机器人面对长时序任务和不可预知的动态干扰,接受从环境感知、智能决策到精准执行的系统性、全链路检验。
赛事专家委员会主席刘云辉院士强调:“机器人能否真正走出实验室,适应我们生活的复杂世界,是我们关注的根本。我们希望通过设置极限挑战,推动机器人技术从‘演示可行’迈向‘应用可靠’。” 从这个意义上说,ATEC2026堪称具身智能领域的“现实版图灵测试”:它不考核系统能否解答特定题目,而是检验其在真实物理世界中的“生存”与“适应”能力。
赛题设计理念:不测单点演示,考验系统生存
在赛题设计上,ATEC2026直指“系统能否在真实世界中稳定、持续运行”这一终极命题,并通过三层递进式考核机制,构建了从“算法验证”到“工程可靠”的完整评测闭环。
首先,赛事直面“仿真到现实迁移”(Sim-to-Real)这一行业核心难题。大赛采用“线上仿真+线下实景”的双阶段赛制:参赛队伍需先在统一的仿真任务与评测标准下,建立可复现的能力基线;随后,将同一套算法与系统部署到真实机器人上,在物理环境中进行检验。这直接针对当前研发痛点——仿真性能虚高与演示环境局限。仿真可以屏蔽大量现实噪声,而真实世界充满变数:细微的摩擦力变化、动态的光照条件、实时的传感器噪声,任何微小变量都可能导致系统失效。ATEC2026将“跨域泛化与迁移能力”本身设为关键考点,通过双阶段一致性验证,拷问系统从虚拟实验室走向真实场景后,其性能是否依然成立。
其次,赛事摒弃了传统的“单点能力”测试,转而考核长时序、多阶段的连续复合任务。要求机器人单次上电运行即完成“移动导航—环境感知—任务决策—机械操作—最终执行”的完整闭环,核心考察其在长时间运行下的系统稳定性、各模块协同性以及抗干扰能力。现实世界的任务从来不是单步指令,而是环环相扣的连续链路。当前多数评测仍停留在“会不会做某个动作”的层面,这只能证明单项能力存在,却无法回答更关键的问题:这些能力能否在动态、开放的真实世界中协同、稳定、可靠地持续运转。ATEC2026的设计意图明确:不测单点,测系统闭环。线上阶段验证基础能力及其组合,线下阶段则要求机器人在真实物理环境中持续运行,在不确定条件下完成整条任务链。
更为关键的是对极端真实环境挑战的引入——决赛将直接设置在开放的户外场景。复杂地形(如坡道、台阶、非结构化路面)、动态扰动、多阶段任务的叠加,迫使系统在完全不可控的条件下进行实时感知与决策。这与精心布置的实验室环境截然不同。在线下决赛中,机器人将进入一个没有“标准答案”的自然环境:地形不规则、光照持续变化、随机干扰频发。系统必须在无人工干预的条件下,实现“边移动、边判断、边修正”,实时完成多阶段挑战。往届ATEC2025的赛事结果已经证明,许多在实验室“运行良好”的系统,会在各种现实变量面前频频失效。当环境不再受控,系统的真实鲁棒性、自适应能力与工程可用性,才是决定其能否最终走向产业应用的唯一标准。
赛制结构解析:能力递进,直至“荒野求生”
刘云辉教授提出的“机器人三大核心能力”——自主移动、灵巧操作、环境交互与改造,构成了一套面向真实应用的系统化能力框架。ATEC2026正是围绕这一框架,将赛题设计成一条清晰的递进路径:从仿真到真实,从可控到开放,层层剥离“理想环境”的保护,最终将系统置于现实世界中进行终极检验。
本质上,这是在将原本难以量化的“长程系统能力”和“环境适应能力”,转化为可以公开比较、客观评分的竞赛结果。对于参赛团队而言,这不仅是一个验证“整套技术方案是否真正成立”的宝贵机会,更是将论文中的算法能力转化为真实世界解决问题能力的关键跨越。
第一阶段:线上仿真赛,建立能力基线
线上赛设立两个独立赛道,每个赛道均包含L0与L1两级难度任务,具体包括:
L0基础任务: 足式运动控制 / 桌面级精细操作任务。此阶段旨在建立统一的能力评估基线,让不同技术路线的团队能在同一标准下进行对齐与比较。
L1进阶任务: 垃圾识别拾取与投放、复杂越障任务。此阶段走向能力组合与集成,以具体场景任务为载体,要求机器人将感知、决策与执行模块串联成完整的工作闭环。关注点从单个模块的性能优化,转向整套系统能否真正协同、流畅地运转。
线上赛任务与线下赛任务在逻辑结构上严格对齐,最终通过客观、自动化的评分机制生成排名。
第二阶段:线下预选赛,验证系统稳定性
晋级队伍将进入标准化的真实机器人测试场地(设中国上海、中国香港、美国匹兹堡三大赛区),在统一赛题与评测标准下同场竞技。机器人需在一次连续运行中,完成自主行走、动态目标识别与抓取、定点精准投放等相关任务。本阶段重点验证:
- 长时序全自主运行能力
- 运动控制与机械操作的高效协同能力
- 系统整体的稳定性与任务可重复性
这是将仿真环境中训练的算法模型首次迁移至真实机器人的“落地首秀”,考核重点不再是“单点能力有多强”,而是集成后的系统能否稳定、协同、可重复地完成任务。许多在仿真中表现优异的方案,往往在此阶段第一次暴露出软硬件结合的断点与缺陷。
第三阶段:线下总决赛,闯入真实世界
最终阶段将进入完全开放的户外环境,难度全面升级,也是“真实世界极限挑战”理念的集中体现。机器人需在一次连续运行中,完成多阶段、多类型的复合任务,挑战内容包括:
- 户外长距离越野导航
- 复杂环境下的垃圾拾取与分类投放
- 动态越障与环境适应性改造
- 自主搜索与多任务规划执行
- 多机器人协同或竞技任务
多个高难度阶段被压缩进同一条连续任务链中。过去依赖剪辑和分段执行的“展示性能力”在这里完全失效。机器人必须将感知、决策、执行的各项能力无缝衔接,并持续、稳定、可靠地运行下去。至此,所有考核都收敛为一个终极问题:在持续变化、充满未知的真实世界中,你的智能体系统还能不能一直做出正确的判断并成功执行?
开放平台与丰厚激励:总奖励超36万美元
如果你正在研发一套具身智能系统,并希望为其寻找一个有公信力的实战验证平台,ATEC2026提供了一个当前全球范围内极为稀缺的顶级舞台。
赛事在机器人硬件形态上保持高度开放与包容,参赛机器人类型包括但不限于:人形/双足机器人(集成机械臂)、四足机器人(集成机械臂)、轮足式机器人(集成机械臂)等。外形并非关键,核心在于机器人能否在真实世界里可靠完成移动、操作与复杂环境交互的核心使命。
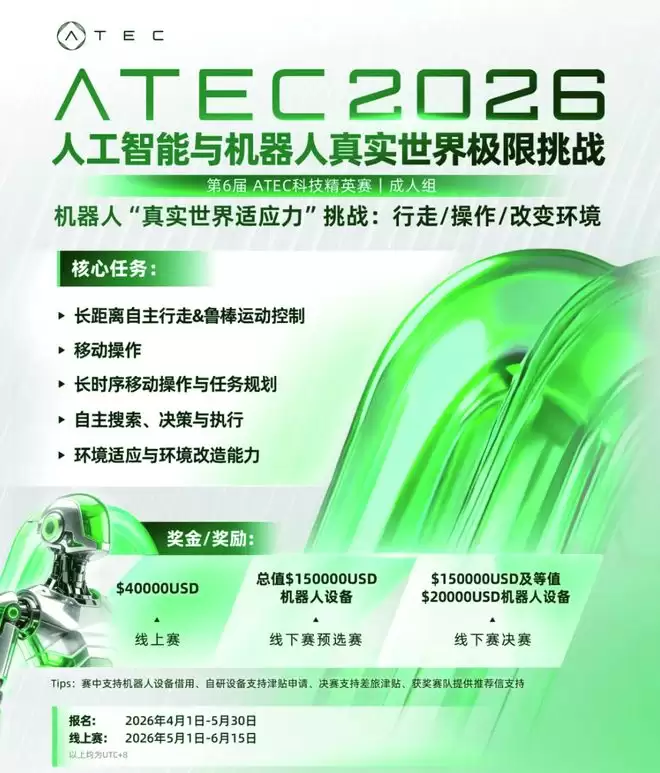
在激励机制上,ATEC2026不仅重奖顶尖优胜者,也充分覆盖具有潜力的中坚团队。从线上赛的每个难度层级,到线下预选赛、总决赛,均设置了分阶段、多层次的奖金和实物奖励:
- 线上赛阶段: L0与L1榜单排名前20%的优秀队伍,将分别平分15,000美元与25,000美元的专项奖金池。
- 线下预选赛阶段: 各分站赛总奖励价值最高可达150,000美元,冠军和亚军队伍将各获得一套高性能机器人设备。
- 线下总决赛阶段: 全球总冠军将独享150,000美元高额奖金,亚军将获得一套价值20,000美元的先进机器人设备。
这样的奖励设置既拔高了竞赛的顶尖水平,也保障了广大参赛团队的持续热情,旨在激励更多真正致力于系统级研发的团队坚持到底,挑战极限。
完整赛程时间安排
具体的全球赛程安排如下,请参赛团队注意关键时间节点:
- 报名时间: 2026年4月1日 10:00 — 5月30日 22:00(北京时间 UTC+8)
- 线上仿真赛: 2026年5月1日 10:00 — 6月15日 22:00(北京时间 UTC+8)
(注:线上赛L1终榜排名前100名的赛队,可获得申报参与线下预选赛的资格。) - 线下预选赛: 2026年9月 — 2026年11月
(共举办3场分站赛:上海站30进15,匹兹堡站10进5,香港站10进5,总计25支队伍晋级决赛。) - 线下总决赛: 2026年12月,将于中国香港举行
(决赛另设特邀赛队,上限5支,因此决赛总参赛队伍上限为30支。)
如果你的机器人系统已经做好准备,渴望走出仿真的温室,进入真实世界接受终极挑战,那么ATEC2026的全球舞台已经为你开启。赛事报名通道现已全面开放,完整赛题详情、技术规则与报名方式,请通过ATEC赛事官方渠道获取。

游乐网为非赢利性网站,所展示的游戏/软件/文章内容均来自于互联网或第三方用户上传分享,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系youleyoucom@outlook.com。
 同类文章
同类文章

粉色蓝莓引发热议 网友质疑是否为AI生成
最近,微博上“粉色蓝莓”的话题引发了广泛讨论。这个名字听起来就充满梦幻色彩,难怪不少网友的第一反应是:这该不会是AI合成的图片吧?事实上,这种看似加了滤镜的水果,是真实存在的蓝莓品种,并非虚拟产物。 粉色蓝莓:真实存在的特殊品种 据封面新闻报道,吉林农业大学园艺学院的蓝莓专家孙海悦教授对此进行了证实

Claude Opus 4.7发布 Anthropic推理模型再获突破
过去这一周(4月10日至17日),AI编程领域可谓风起云涌,迎来了一波密集且重量级的更新。Anthropic发布了Claude Opus 4 7,OpenAI为其Codex应用增添了“电脑控制”和内置浏览功能,Cursor推出了交互式画布Canvases,而Windsurf 2 0则直接集成了Dev

Anthropic警示MCP设计缺陷影响超20万台服务器与3万代码库
▲头图由AI辅助生成 智东西编译 陈佳编辑 程茜 随着AI生态的迅猛发展,协议层的安全风险正被急剧放大。近日,一份来自安全研究机构的深度报告,曝光了AI领域一项基础协议存在的重大设计缺陷,其潜在影响范围之广,敲响了整个行业的警钟。 4月15日,以色列网络安全公司OX Security发布研究报告,直

苏昊回国任教复旦出任通用物理AI院长具身智能高引学者
具身智能领域论文被引次数最高的华人学者,带着十七年海外积淀,回来了。 就在刚刚落幕的第五届中国三维视觉大会(China3DV 2026)上,李飞飞弟子、ImageNet缔造者之一的苏昊,正式被复旦大学官宣加盟。 根据校方消息,苏昊将担任复旦大学浩清特聘教授,并领衔建设通用物理智能研究院,出任院长一职

零跑D19豪华SUV上市 21.98万起售 科技旗舰新选择
聊到性能,这台车的增程版和纯电版给出了两种不同的解题思路。增程版用上了1 5T增程器,配合一块80 3kWh的磷酸铁锂电池,CLTC纯电续航能做到500公里,并且支持800V高压快充,补能效率有保障。如果你更倾向于纯粹的电动体验,那么纯电版配备的115kWh大电池会是更好的选择,最高720公里的续航








- 日榜
- 周榜
- 月榜
 1
1
 2
2
 3
3
 4
5
6
7
8
9
10
相关攻略
4
5
6
7
8
9
10
相关攻略
 2015-03-10 11:25
2015-03-10 11:05
2021-08-04 13:30
2015-03-10 11:22
2015-03-10 12:39
2022-05-16 18:57
2025-05-23 13:43
2025-05-23 14:01
热门教程
2015-03-10 11:25
2015-03-10 11:05
2021-08-04 13:30
2015-03-10 11:22
2015-03-10 12:39
2022-05-16 18:57
2025-05-23 13:43
2025-05-23 14:01
热门教程
- 游戏攻略
- 安卓教程
- 苹果教程
- 电脑教程































 热门话题
热门话题
