




高德ABot模型夺冠全球挑战赛 空间智能实现具身化突破

全球机器人学与自动化领域的顶级盛会ICRA 2026圆满结束,其官方核心赛事AGIBOT World Challenge的最终成绩也正式公布。在竞争异常激烈的World Model(世界模型)赛道中,来自高德与中科院自动化所模式识别国家重点实验室的联合团队ABot-NeoVerse,从全球超过150支顶尖参赛队伍中强势胜出,以0.829的总分荣获冠军。
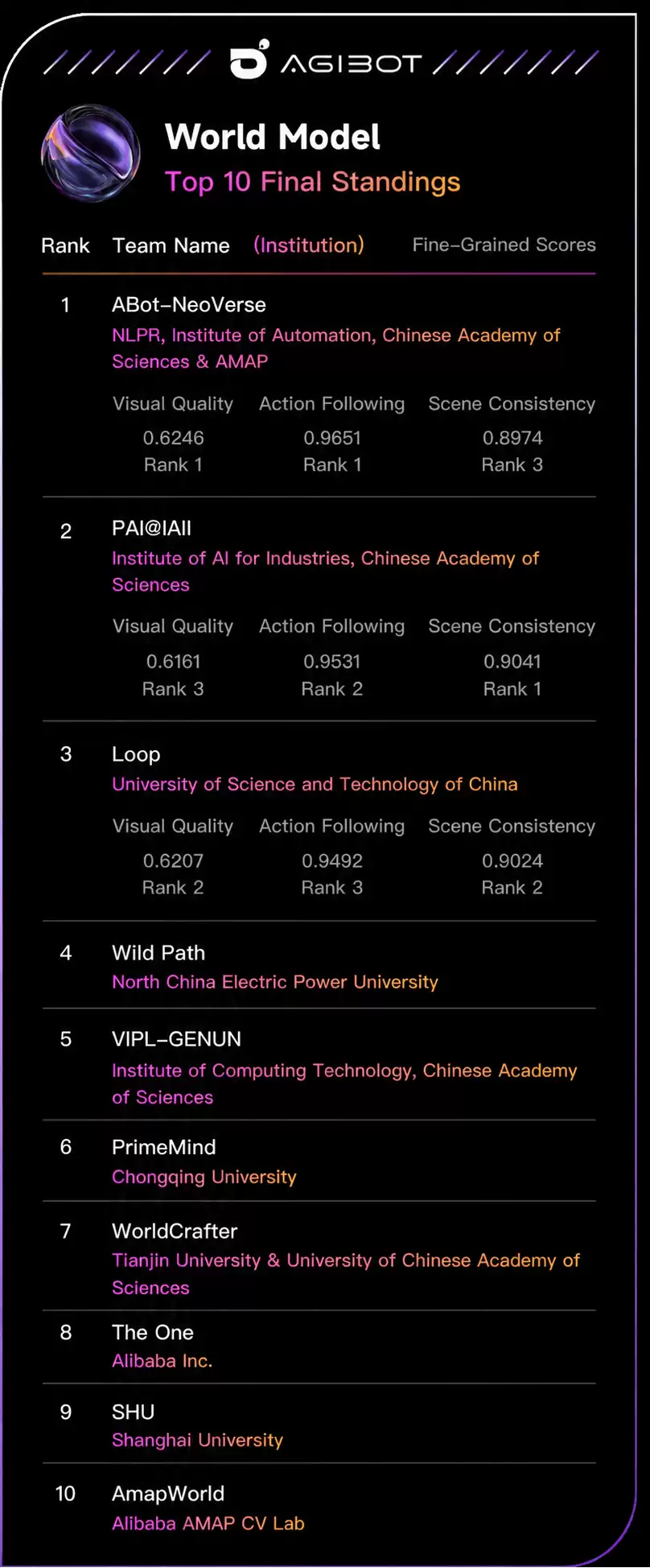
本届AGIBOT挑战赛设置了推理—操作与世界模型两大核心赛道,吸引了来自全球27个国家及地区的数百支顶尖高校与企业团队参与角逐。特别是在世界模型这一前沿赛道上,更是高手如云,包括中科院工业人工智能研究所、中科院计算技术研究所、中国科学技术大学、重庆大学等国内知名科研院校均派出了实力强劲的队伍。
ABot-NeoVerse团队此次夺冠并非偶然,它是高德ABot全栈具身智能技术体系中的关键组成部分。这一胜利标志着高德在具身智能这一前沿领域的系统性技术布局取得了突破性进展。
就在上月,高德正式对外发布了其自主研发的ABot全栈具身技术体系,并在亦庄机器人创新挑战赛上,首次公开展示了基于该体系架构打造的全球首款面向开放环境的全自主具身机器人——“高德途途”。这次演示,完整呈现了高德从底层技术架构到终端机器人产品的研发与落地闭环。
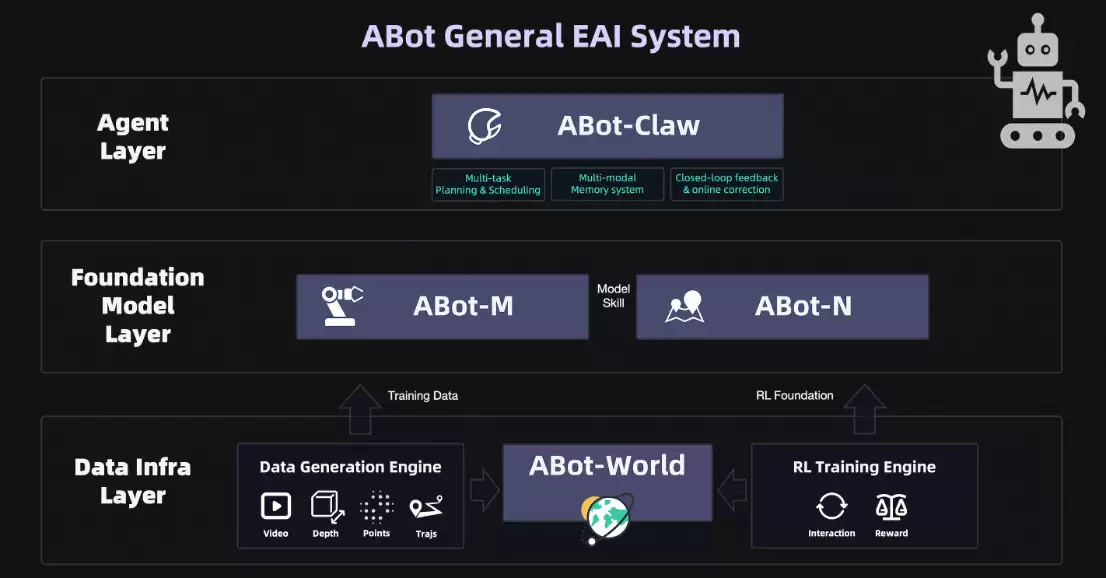
那么,高德ABot技术体系究竟是什么?简而言之,它是高德将其在空间智能与地图领域多年的深厚技术积累,系统性地迁移并应用于具身智能领域的顶层设计框架。该体系包含数据层、模型层和应用层三层架构,通过“数据驱动模型、模型赋能应用、应用反馈数据”的闭环耦合设计,旨在从根本上解决当前制约行业发展的两大核心瓶颈:高质量训练数据稀缺与仿真到现实的巨大鸿沟。可以说,这是全球范围内首个面向通用人工智能(AGI)目标构建的、端到端的全栈具身智能技术解决方案。
此次夺冠的ABot-NeoVerse模型,正位于该体系最底层、也是最核心的数据层,堪称驱动整个ABot架构高效运转的“核心引擎”与高质量“数据燃料”。这里存在一个根本性行业难题:与训练大语言模型(LLM)所需的海量文本数据不同,训练高性能具身智能模型所需的数据——即机器人与真实物理世界进行交互产生的多模态数据——极其稀缺且获取成本高昂,其采集与标注成本往往是文本数据的数个数量级,直接制约了技术发展的上限。
高德给出的创新解决方案是,通过自研的高精度世界模型来批量合成高保真度、高仿真度的训练数据。这种方法不仅能指数级降低数据获取成本,更关键的战略意义在于,它能从源头有效弥合虚拟仿真环境(Simulation)与真实物理世界(Reality)之间的“仿真鸿沟”。这虽然是全球AI领域应对“数据荒”的主流技术路径,但随之也带来了新的挑战:既然训练数据由模型生成,那么如何确保这些合成数据不产生“幻觉”、不偏离事实,并严格遵循真实的物理规律(即保证物理一致性),就成了决定技术成败的核心关键。
ABot-NeoVerse模型在本届AGIBOT挑战赛中夺冠,正是高德成功突破这一核心难题的有力证明。本届比赛的核心评测点,在于考察模型在仅给定初始视觉观察画面和一系列机器人操作指令序列后,对后续物理场景状态演变的精准预测与推理能力,赛事中还特意加入了大量复杂、动态且罕见的长尾交互场景进行极限挑战。这本质上,就是在严格拷问世界模型:你生成或预测的后续场景视频,能否在保证高视觉逼真度的同时,严格遵循牛顿力学等物理定律,准确无误地预测出每一个动作指令所引发的真实物理结果?
最终,ABot-NeoVerse交出了一份近乎完美的答卷。它在涉及多步骤、多物体的复杂操作任务预测中,持续保持了物体状态、属性与运动结果的高度物理一致性,有效抑制了动作预测中常见的“幻觉”现象。该模型不仅在总排行榜上位列第一,更在Visual Quality(视觉质量,得分0.6246)与Action Following(动作指令跟随精度,得分0.9651)两项最具含金量的核心评测指标上实现了“双料第一”。这一卓越成绩,直观且有力地印证了高德ABot全栈体系在高质量合成数据治理和先进模型训练范式上,已经建立了显著的代际优势。
事实上,在登顶AGIBOT全球挑战赛之前,ABot技术体系及其核心模型已在机器人操作、视觉推理等领域的15项国际权威基准评测中获得了SOTA(当前最佳性能)成绩。这套经过国际顶级赛事严苛验证的全栈技术底座,已被直接集成并部署到实体机器人“高德途途”的系统之中,使其在复杂多变、非结构化的开放真实环境中,具备了传统编程机器人难以企及的环境泛化理解、自主任务分解与稳健执行能力,真正实现了从前沿算法突破到产品级全自主作业能力的成功跨越。
“高德途途”机器人完整继承了ABot体系在物理规律内化、长时序动态预测与高泛化任务可用性方面的核心能力。在2026年亦庄机器人马拉松的公开演示中,它成功引导一位视障人士在动态人流与静态障碍物并存的环境中,安全、流畅地完成了动态避障、静态避障、理解并执行通用语音指令等一系列高难度任务,全景式展现了其在开放环境下实现全自主作业的强大技术实力。
行业专家分析指出,高德通过将自身成熟的空间智能资产(如高精地图、场景理解)与前沿的物理世界模型进行深度融合与创新,为具身智能的产业化发展提供了一条清晰、可工程化验证的全栈技术路径。这套全栈架构的逐步成熟与成功验证,也标志着具身智能技术正从实验室原型阶段,迈向具备规模化工程应用潜力的新发展阶段。

游乐网为非赢利性网站,所展示的游戏/软件/文章内容均来自于互联网或第三方用户上传分享,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系youleyoucom@outlook.com。
 同类文章
同类文章

OpenClaw如何预示人工智能无处不在的未来
OpenClaw展示了AI从被动助手向主动智能体的演进,能跨设备执行任务,如规划路线、追踪物流等,运行于低成本开发板。其发展需满足随时可用、情境感知和多终端协同等条件,重点转向系统优化。规划器是协调行为的关键,当前部署结合终端轻量与云端复杂处理,高通等技术公司正通过高效硬件支撑跨。

摩托罗拉moto razr 70 Ultra折叠屏手机发布 售价7499元起
联想旗下摩托罗拉正式发布motorazr70Ultra小折叠手机,起售价7499元。新机采用第七代星轨转轴,配备4英寸165Hz外屏与7英寸1 5K165Hz内屏,峰值亮度达5000尼特。核心搭载高通骁龙8至尊版处理器与5000mAh电池,影像系统后置50MP三摄,并宣称在折叠屏中首发L

谷歌Gemini Omni Flash多模态视频生成模型详解
在今年的Google I O开发者大会上,谷歌正式发布了名为Gemini Omni Flash的多模态AI模型,迅速成为人工智能领域的热门话题。它不仅仅是一个视频生成工具,更被定位为“从任意输入生成任意输出”的统一多模态生成框架。简单来说,它旨在将谷歌在AI领域的多项核心技术——包括Gemini的复

摩托罗拉首款大折叠屏手机上市 骁龙8 Gen5加持售价9999元起
联想旗下摩托罗拉正式发布首款大折叠屏手机motorazrfold,起售价为9999元。该机搭载高通骁龙8Gen5芯片,配备8 1英寸内屏和6 6英寸外屏,内外屏均采用康宁大猩猩玻璃陶瓷3。续航方面内置6000mAh大电池,支持80W有线和50W无线快充。后置三颗5000万像素摄像头,并支持

亿咖通携手美国企业布局自动驾驶出租车市场
亿咖通科技宣布与美国自动驾驶公司MayMobility达成战略合作,正式进军Robotaxi领域。根据协议,亿咖通将为MayMobility的自动驾驶出租车车队提供智能驾驶全栈解决方案,包括交付数万套定制L4级中央计算平台和传感器硬件,项目总价值约7 5亿美元。双方共同目标是在2028年前将自动








- 日榜
- 周榜
- 月榜
 1
1
 2
2
 3
3
 4
5
6
7
8
9
10
相关攻略
4
5
6
7
8
9
10
相关攻略
 2015-03-10 11:25
2015-03-10 11:05
2021-08-04 13:30
2015-03-10 11:22
2015-03-10 12:39
2022-05-16 18:57
2025-05-23 13:43
2025-05-23 14:01
热门教程
2015-03-10 11:25
2015-03-10 11:05
2021-08-04 13:30
2015-03-10 11:22
2015-03-10 12:39
2022-05-16 18:57
2025-05-23 13:43
2025-05-23 14:01
热门教程
- 游戏攻略
- 安卓教程
- 苹果教程
- 电脑教程































 热门话题
热门话题
