




速腾聚创发布VGA大面阵SPAD芯片 固态激光雷达像素竞赛升级

近日,激光雷达行业迎来了一项里程碑式的技术创新。RoboSense速腾聚创正式发布了名为“创世”的全新数字化架构平台,并同步推出了基于该平台的两款旗舰级芯片产品。这套架构本质上是一个可快速迭代的SPAD-SoC芯片级解决方案,其核心目标非常明确:为激光雷达的大规模量产与高性能持续升级,构建一个坚实、可靠的核心技术底座。
其中,凤凰芯片作为全球首颗单片集成原生2160线的车规级SPAD-SoC,实现了超过400万像素的超高分辨率与600米的超远探测能力,预计将于2026年内实现量产装车。另一款孔雀芯片,则被定位为业界首款可量产的640×480分辨率全固态大面阵SPAD-SoC,计划于2026年第三季度投入量产。此次发布清晰地表明:激光雷达的核心技术竞争,已经全面进入芯片级赛道。通过数字化的架构遵循摩尔定律,行业有望在持续提升激光雷达性能、增强感知能力的同时,不断优化其成本结构,加速普及进程。

速腾聚创Tech Day现场
从“稀疏点云”到“图像级感知”的关键跨越
当行业仍习惯于用“线数”来评估激光雷达性能时,速腾聚创在2026年的Tech Day上,明确指出了下一代固态激光雷达的发展方向:正从“稀疏点云”时代迈向“图像级感知”时代。
过去几年,固态激光雷达的技术痛点主要集中于两方面。一是分辨率不足,点云过于稀疏,难以满足近距离高精度感知的需求;二是视场角与近场盲区难以兼顾,尤其在自动驾驶补盲和机器人场景下,低矮障碍物、悬空物体等常常成为“感知盲区”。此次发布的孔雀芯片,正是针对这些行业痛点给出的系统性解决方案。
分辨率革命:VGA级深度图像的巨大应用价值
孔雀芯片集成了640×480的超高密度SPAD面阵,达到了VGA级分辨率、约30万有效像素,能够输出极其稠密的三维深度图像。相较于上一代144×192大面阵产品约2.76万像素的水平,其点云密度和感知性能实现了超过10倍的巨大跃升。
需要了解的是,此前行业主流的补盲激光雷达分辨率普遍停留在QVGA(320×240)甚至更低的阶段。VGA级点云密度的大幅提升,意味着激光雷达输出的不再是稀疏的物体轮廓点,而是能够清晰刻画物体边缘细节与内部结构的深度“图像”。例如,在10米距离外,低分辨率方案可能只能探测到一个行人的模糊轮廓,而VGA级方案则已经可以分辨出行人的头部、肩部、四肢等关键部位的空间位置。
在自动驾驶的侧向补盲场景中,这种分辨率的提升可以直接转化为对儿童、宠物、锥桶、轮胎碎片等小型或低矮目标的稳定检测与识别能力。再结合其180°×135°的超广水平与垂直视场角,以及小于5厘米的极近探测距离,车辆在低速泊车或通过复杂路口时,能够同时无盲区地覆盖车身近场区域和侧向远区,从而彻底解决了传统补盲雷达在探测距离与近场盲区、大视场角与高角分辨率之间难以兼顾的技术矛盾。
机器人应用:从“移动导航”到“精细操作”的数据统一
在机器人应用领域,孔雀芯片带来的价值远不止于避障导航。过去,移动机器人通常使用低线数激光雷达进行SLAM建图与定位,但在执行抓取、分拣、装配等需要精细操作的任务时,往往需要额外配置高精度的视觉相机或结构光传感器。两套独立的感知系统,其数据坐标系和时间戳难以完全同步,增加了系统复杂度、标定成本和融合误差。
而孔雀芯片输出的VGA级高密度深度图,其空间分辨率已接近入门级深度相机,同时具备激光雷达固有的毫米级测距精度。这使得机器人可以在同一传感器、同一时间戳的数据流中,同步完成自身的精确定位和对操作目标的精细感知。这种“移动导航”与“精细操作”感知数据的底层统一,在工业机械臂抓取不规则工件、服务机器人识别并操作桌面物品等场景中,其降本增效的价值尤为显著。

速腾聚创孔雀芯片
视场、精度与协同能力的全面进化
除了分辨率的飞跃,孔雀芯片在视场角、测距精度和多传感器协同方面也实现了显著提升。180°×135°的超广视角,是目前全固态激光雷达中领先的规格之一,配合小于5厘米的最近探测距离,能有效解决车辆或机器人在紧贴车身/机身范围内的近场感知盲区问题,对于自动泊车时识别低矮地锁、仓储机器人贴墙通行等场景至关重要。
在测距精度层面,芯片内置的高精度TDC(时间数字转换器)与专用测距处理引擎,将测距精度提升至毫米级,较上一代产品提升了约6倍。此外,其支持的10-30Hz可调帧率,能够与主流车载摄像头的输出帧率灵活对齐,这极大降低了自动驾驶系统中激光雷达与摄像头进行时间同步的工程调试难度,提升了多传感器融合的效率和可靠性。
从“功能件”到“智能感知模组”的角色演化
当前,激光雷达行业正在经历一场深刻的角色转变:从单纯的“三维测距功能件”向集成了部分前端处理的“智能感知模组”演化。VGA级分辨率,或许只是实现“图像级感知”的起点。随着自动驾驶和具身智能等物理AI应用对三维数据精度和丰富度的要求不断提高,更高像素、更高帧率、更深层次软硬件融合的感知方案,必将持续演进。
速腾聚创通过“孔雀”芯片,在固态激光雷达技术路线上率先完成了VGA级大面阵SPAD的商业化落地,提供了一个性能标杆明确、可大规模复制的硬件基座。这无疑有助于其在车载补盲雷达和机器人感知市场等应用端,建立起显著的先发优势和竞争壁垒。
此外,速腾聚创也在同步推进多传感器融合的前瞻布局。其于2025年推出的AC1、AC2主动摄像头系列,采用了高分辨率CMOS图像传感器与自研SPAD芯片融合的创新技术路线,为行业提供了多元化的RGBD(彩色+深度)融合感知方案选择。本次Tech Day现场,速腾聚创CEO邱纯潮展示了一组由凤凰芯片直接感光、实时扫描生成的2K分辨率近红外图像,其灰度信息与三维距离信息同源同步输出,分辨率达到了2160×1900,展现了芯片级融合的潜力。
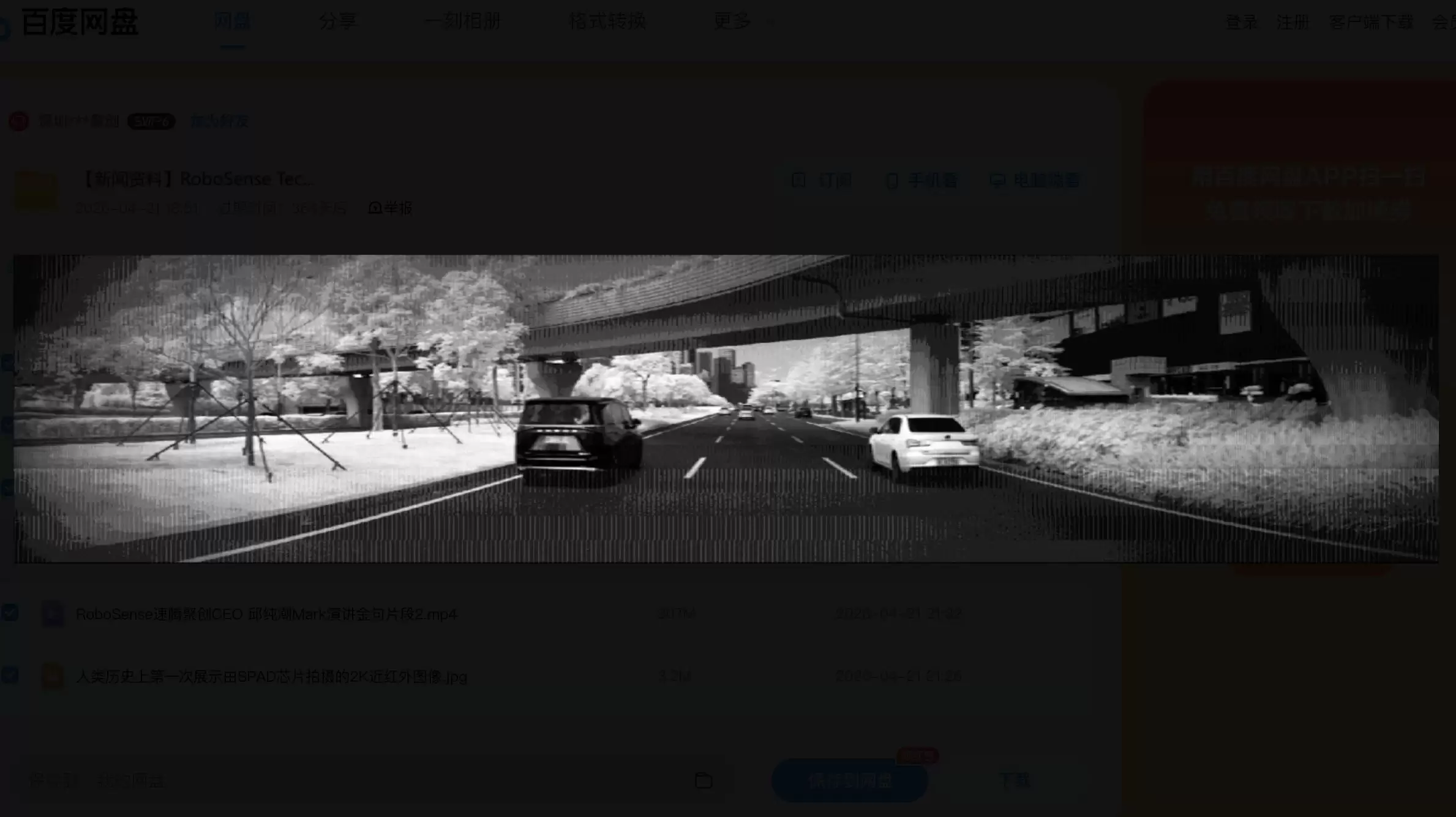
由凤凰芯片直接感光、实时扫描生成的2K近红外图像
据透露,其真正的像素级融合RGBD传感器预计将在2027年底面世。届时,SPAD芯片的像素密度和集成度将进一步提升,最终实现像素级的“彩色视觉信息”与“深度距离信息”双重数据的高精度同步输出。这或许才是激光雷达作为下一代智能驾驶和机器人核心感知模组的终极形态与发展方向。

游乐网为非赢利性网站,所展示的游戏/软件/文章内容均来自于互联网或第三方用户上传分享,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系youleyoucom@outlook.com。
 同类文章
同类文章

神州租车与一汽大众达成战略合作 首批新车正式交付启用
4月22日,神州租车与一汽大众正式达成年度战略采购合作,并现场完成了首批新车的交付仪式。此次交付的车型阵容强大,包括宝来、迈腾等一汽大众旗下多款热门主力车型,旨在精准满足用户在城市日常通勤、高端商务差旅以及家庭假日自驾等多种场景下的多元化租车需求。 在签约现场,神州租车CEO高德武深入解读了此次战略

停车按分钟计费新规实施告别一小时起步收费时代
贵阳在部分路段试行路侧停车按分钟计费,取代以往不足15分钟按15分钟收费的规则。新规以1分钟为最小计费单位,使短时停车成本平均下降超40%,泊位周转效率提升25%。此举旨在通过精准计费减少纠纷、引导即停即走,并计划逐步推广,体现了城市管理向精细化、惠民化的转变。

北京新能源小客车指标配置15.9万个 家庭中签率36.5%入围分创新低
2026年北京新能源小客车指标配置结果揭晓,共配置15 9万个指标。家庭指标额度11 92万个,最低入围分数降至36分,创历史新低,中签率约36 5%。个人指标额度3 48万个,中签率约6 1%。失信被执行人被限制申请,入围家庭需通过核查并在12个月内办理车辆登记。

特斯拉超级充电卡开放非车主购买 79元50度电尝鲜版与599元400度电畅享版
特斯拉超级充电卡正式向非特斯拉车主开放,提供尝鲜版和畅享版两档选择。尝鲜版79元含50度电,畅享版599元含400度电,平均电价分别约为每度1 58元和1 5元。此举是特斯拉充电网络开放政策的进一步产品化,非特斯拉车主可在支持站点享受高功率充电、分时电价及停车费减免等权益。

三体宇宙公司回应许垚被执行死刑 正义终得伸张
2026年5月21日,曾轰动中国科技与文娱产业的“游族网络董事长林奇被投毒案”迎来最终判决。经最高人民法院核准,对被告人、三体宇宙原CEO许垚执行死刑。这起历时数年的重大刑事案件,终于尘埃落定。 案件回顾至2020年12月。当月17日,上海警方接到某医院报警,称一名39岁林姓患者出现疑似中毒症状,生








- 日榜
- 周榜
- 月榜
 1
1
 2
2
 3
3
 4
5
6
7
8
9
10
相关攻略
4
5
6
7
8
9
10
相关攻略
 2015-03-10 11:25
2015-03-10 11:05
2021-08-04 13:30
2015-03-10 11:22
2015-03-10 12:39
2022-05-16 18:57
2025-05-23 13:43
2025-05-23 14:01
热门教程
2015-03-10 11:25
2015-03-10 11:05
2021-08-04 13:30
2015-03-10 11:22
2015-03-10 12:39
2022-05-16 18:57
2025-05-23 13:43
2025-05-23 14:01
热门教程
- 游戏攻略
- 安卓教程
- 苹果教程
- 电脑教程































 热门话题
热门话题
