




SpatialAgent大模型生成地理分析工作流实现方法详解

大语言模型正深度赋能地图、城市与交通等空间应用领域。然而,当前面临的核心挑战已发生转变:用户提出的问题,往往不再是简单的“查询一个地点”或“调用一次路线规划API”就能解决的。真正的难点在于,如何将一段模糊、复杂的自然语言指令,准确解析并组织成一套逻辑严密、可执行、可验证的地理空间分析工作流。
例如,用户可能询问:“在某个区域内,有哪些餐厅同时满足距离地铁站近、评分高、正在营业且停车方便等多个条件?”或者:“请规划一条包含多个必访景点、有时间窗口限制、且混合了步行、公交和打车等多种交通方式的行程方案。”这类复杂的地理空间分析问题没有现成答案,它要求智能系统首先理解空间范围,进而梳理其中的地理对象、空间关系与度量指标,最后按照正确的逻辑顺序调用一系列工具。这已深入到了地理信息科学(GIScience)的典型分析范式。
近期,一篇题为《Spatial-Agent: Agentic Geo-spatial Reasoning with Scientific Core Concepts》的学术论文,正是瞄准了这类复杂的地理空间智能分析任务。其核心创新思路是:让基于大语言模型(LLM)的智能体在盲目调用地图工具之前,先构建一个可检查、可验证的分析流程图。这个流程图将明确界定:问题涉及哪些核心空间概念?哪些是约束条件?最终需要计算什么度量指标?各个分析步骤之间如何依赖?
为什么简单的地图问答不等于复杂的地理空间分析?
单步的地图API调用,擅长回答确定性的、事实型的地理查询。例如,输入地点名称返回其详细信息,或者给定起点和终点返回导航路线。这构成了大多数现有地图应用的基础能力。
然而,一旦涉及稍复杂的地理空间分析任务,通用智能体方案的短板便暴露无遗。它固然能生成“思考-行动-观察”链(如ReAct),也能顺利调用地理编码、地点搜索、路径规划等工具。但关键在于,工具调用本身不出错,并不代表整个分析流程的逻辑顺序是正确的。
一个典型例子是:“计算某个特定区域内某类设施(如公园)的面积占比”。如果分析流程是先对全城所有公园面积进行聚合,再将结果按比例套用到目标区域,与先通过空间筛选出目标区域内的公园、再计算其面积比例,两者得出的结果将天差地别。LLM可能会生成多种看似合理的工具调用序列,但从地理信息科学(GIS)的专业视角审视,通常只有一种特定的顺序能得到与问题意图严格匹配的正确答案。分析顺序一旦出错,后续所有计算结果都将偏离原意。
Spatial-Agent 解决方案:将自然语言问题转化为GeoFlow分析图
Spatial-Agent提出的创新解决方案,是在自然语言问题与具体工具执行之间,插入一个结构化的中间表示层:GeoFlow Graph(地理流程图)。这并非普通的文本思维链,而是一个由节点和边构成的、显式表征分析逻辑的图结构。节点对应具体的空间概念或数据,边则表示概念之间的转换关系与操作依赖。智能体随后严格依据图上定义的依赖关系,有序调用相应的地理空间工具。
你可以将其理解为“先搭好分析骨架,再填充具体血肉”的策略。底层的地图API和空间分析工具依然至关重要,但它们只负责完成工作流中的具体原子操作。决定最终答案正确性的关键,在于这些操作是否围绕空间问题的核心,被有序、正确地组织成一个完整的分析链条。
理论根基:源自GIScience的核心概念与功能角色框架
这项工作的理论深度,源于对地理信息科学(GIScience)数十年积累的深度借鉴。它主要运用了两类理论工具:一类用于描述空间信息本身“是什么”(本体论),另一类用于描述这些信息在分析过程中“起什么作用”(功能论)。
第一类,即“空间信息核心概念”。自Goodchild在1992年将GIS提升至科学层面以来,学界一直在提炼和形式化地理现象的基本组成单元。Kuhn在2012年系统总结了位置(Location)、场(Field)、对象(Object)、网络(Network)、事件(Event)等核心地理概念。
第二类,更接近“分析流程中的功能角色”。Scheider等人的研究致力于将核心概念与有效的数据转换操作联系起来;后续的“地理分析问答”研究则强调,许多地理问题的答案需要通过GIS工作流计算得出。Xu和Scheider等人进一步将地理分析问题解释为一系列“概念转换”,并用“功能角色”来描述一个概念是在限定分析范围(Extent)、充当筛选条件(Condition)、提供支撑对象(Support),还是作为最终度量指标(Measure)。
Spatial-Agent完整沿用了这条理论线索。它会自动识别用户问题中蕴含的Location、Object、Field、Event、Network、Amount、Proportion等空间概念,同时为这些概念标注出Extent(范围)、Condition(条件)、Support(支撑)、Measure(度量)等功能角色。前者回答了“问题里涉及哪些地理要素”,后者则明确了“这些要素在本次分析中分别承担什么功能”。
核心方法:从概念抽取到工具执行的完整流程
构建GeoFlow Graph之所以必要,是因为许多复杂地理空间分析问题的难点,不在于单个工具的执行,而在于多个工具及其产生的中间结果之间的复杂依赖与顺序关系。系统必须清晰判断:应该先确定目标地点还是先划定分析范围?先构建交通网络还是先判断候选点可达性?最终的度量指标又依赖于哪些中间计算结果?
Spatial-Agent的处理流程可大致分为四个核心环节:
- 概念与角色识别:首先,从自然语言查询中提取地点、空间对象、事件、网络、度量目标等核心空间概念,并为它们分配精确的功能角色,从而将模糊的文本问题转化为可进行结构化地理分析的计算单元。
- 宏观模板匹配:参考一组预先定义并验证过的“宏观分析模板”。这些模板对应地理任务中频繁出现的经典分析模式,例如“空间筛选-属性聚合-度量计算”、“从离散对象生成距离场”、“多约束路线优化”、“基于方位的位置分类”。模板的作用是引导模型避开明显不合理或低效的转换顺序,提供可靠的流程骨架。
- 地理流程图构建:基于识别出的概念、角色以及匹配的候选模板,系统构建出最终的GeoFlow Graph。该图必须满足操作顺序逻辑、数据类型兼容性、数据可用性以及图连通性等多重约束,确保既能忠实反映语言问题的意图,又能切实落地到后续的具体工具执行。
- 图执行与答案生成:将图上的每一个概念转换关系,映射到具体的地理空间工具或API操作,如地理编码、POI搜索、路径规划、距离矩阵计算、空间叠加分析、行程优化等。系统全程记录中间状态,并基于工具返回的最终结果生成清晰、准确的文本答案。
这种基于图的设计天然支持执行后的检查与追溯:系统识别了哪些空间概念?哪些约束条件被优先处理?最终答案依赖于哪些关键的中间结果?对于地图类智能体而言,这种可追溯、可验证、基于结构化流程的分析方法,远比一段黑箱的、线性的自然语言推理链更易于调试、解释和验证其正确性。
实验评估:工作流约束带来更稳定可靠的智能体表现
论文在MapEval-API和MapQA两个权威的地理空间问答基准上全面评估了Spatial-Agent的性能。MapEval-API覆盖了地点信息查询、附近搜索、路径规划和多日行程规划四类基于真实API的地图任务,数据涉及全球54个国家的180个城市;MapQA则基于开放的OpenStreetMap数据,包含开放域的地理空间复杂问答。
实验结果可以总结为以下几点核心发现:
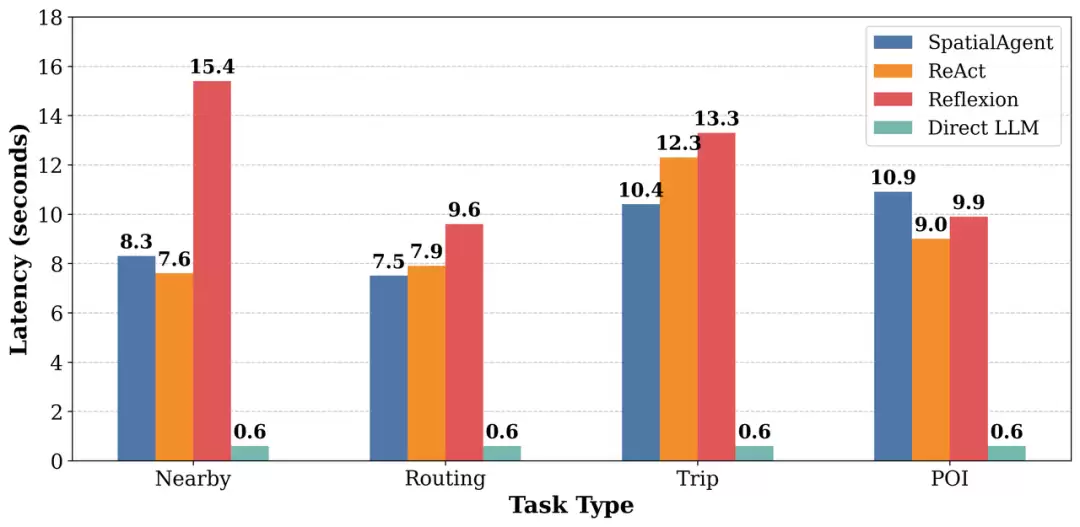
上图清晰展示了不同方法在MapEval-API各类任务上的平均查询延迟对比。所有对比方法均使用相同的GPT-4o-mini模型作为基础。直接使用LLM(Direct LLM)生成答案的延迟最低,但其完全缺乏工具 grounding能力(即无法与真实地理数据和工具对接)。在各类具备工具调用能力的智能体方法中,Spatial-Agent在路径规划(Routing)任务上响应最快,在附近搜索(Nearby)和复杂行程规划(Trip)任务上,其延迟与经典的ReAct方法表现接近,维持在可接受的水平。
进一步的错误分析指出,系统的失败案例更多集中在执行层,例如同名地点匹配错误、POI(兴趣点)信息缺失、营业时间数据不准确或实时路线数据不完整。这个结果颇具启发性:当空间分析流程被GeoFlow Graph正确构建之后,外部地理数据源的质量和API服务的可靠性,就成了影响最终性能表现的新瓶颈。
论文对68个MapEval-API任务中的错误样例进行了细致的人工归因分析。数据显示,数据质量问题(Data Quality Issues,占45.6%)和搜索结果不匹配(Search Result Mismatch,占33.8%)是主要的错误来源,且均发生在具体的工具执行阶段;而与概念角色分配(Concept & Role Assignment)以及最终回答生成(Response Generation)相关的逻辑错误各占约10.3%。这有力地印证了Spatial-Agent所采用的工作流设计与构建方法本身是有效且可靠的。
结论与展望:超越泛化的“空间推理”口号
需要明确的是,Spatial-Agent的研究重点,并非宣称大模型突然掌握了所有意义上的通用空间推理能力。在计算机视觉、机器人导航、3D场景理解等领域,空间问题各有其独特的技术路线与挑战。这篇工作处理的是更具体、更垂直的一类任务:面向地理空间领域的复杂问答与GIS风格的分析工作流自动化。
其核心研究价值在于,成功地将GIScience中关于核心概念、功能角色和工作流组合的成熟理论,巧妙地嫁接至LLM智能体的中间表示与执行过程。这使得智能体在回答复杂地图问题时,不再仅仅满足于将若干个API进行简单的线性串联,而是能先形成一张可被验证、可被解释、可被精确执行的GeoFlow Graph分析蓝图。
当然,这项工作仍有其局限性。外部地理空间API的数据质量与覆盖度直接制约系统表现,预设的模板库也无法穷尽所有可能的地理分析模式。此外,细粒度的概念标注和图结构构建目前仍需要一定的人工先验知识。未来值得探索的方向包括:支持更多语言和区域环境、处理更专业(如城市规划、环境监测)的地理分析任务,以及与更复杂、更强大的空间分析工具链(如ArcGIS, QGIS插件)进行深度集成。
总而言之,Spatial-Agent带来的核心启发是:当AI智能体进入一个拥有深厚理论积淀和成熟工具体系的专业领域(如地理信息科学)时,仅靠通用的任务规划与工具调用能力往往力有不逮。真正的关键突破点,在于如何将领域内已有的经典分析范式、方法论和理论框架,创造性地转化为模型能够理解、运用和推理的中间表示结构。这或许是通往更可靠、更专业、更可信赖的领域智能体的必经之路,也为大模型在垂直行业的深度应用提供了有价值的范式参考。

游乐网为非赢利性网站,所展示的游戏/软件/文章内容均来自于互联网或第三方用户上传分享,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系youleyoucom@outlook.com。
 同类文章
同类文章

育碧孤岛惊魂7秘密测试生成式AI技术细节曝光
近日,游戏行业一则动态引发广泛关注:据可靠消息透露,育碧(Ubisoft)正利用尚未公布的《孤岛惊魂7》早期开发版本,秘密进行生成式AI技术的内部测试。然而,长期追踪该系列动态的知名行业爆料人随后评价称,当前测试阶段的AI表现“效果仍不理想”。 测试处于早期阶段,不影响正式版品质 知情人士指出,育碧

海尔发布全球最轻AI运动外骨骼机器人仅重1.75公斤
近日,海尔集团重磅推出全新AI运动外骨骼机器人W3,以仅1 75公斤的整机重量,刷新了全球同类产品的轻量化纪录。这不仅标志着海尔在智能机器人领域的重要突破,更意味着人体运动增强技术在“轻量化”与“智能化”两大核心发展方向上取得了实质性进展。 航天级材料成就极致轻量机身 海尔W3外骨骼机器人最突出的亮

ClawBot响应速度实测用户消息多久能收到回复
ClawBot的响应速度因部署场景而异。本地部署并启用OCR与翻译功能时,平均响应时间约为623毫秒。作为企业微信AI客服时,首条回复可稳定在0 8秒内。通过微信发送指令触发异步任务时,系统初始响应的中位延迟约为1 2秒。总体而言,其速度在不同应用场景下均能实现快速响应。

通义万象制作建筑杂志级室内效果图全攻略
使用通义万象生成专业室内效果图需结构化提示词,融合空间类型、设计流派与摄影参数。建议分层控制结构、材质、光照与构图,并上传杂志参考图以提升风格一致性。生成后可进行色彩校正与锐化等后处理,同时锁定随机种子与分辨率等参数以确保输出稳定。

韩国物理AI获4180万美元融资 视频预训练技术落地路径解析
2026年,全球具身智能赛道的热度不减,但关于其核心技术——视频预训练——的商业价值,争论也从未停歇。一边是资本持续涌入,另一边则是质疑声不断:依赖互联网视频训练机器人,究竟是通往未来的捷径,还是阶段性的技术噱头? 最近,韩国初创公司RLWRLD的一笔融资,为这场争论提供了一个极具象的观察样本。这家








- 日榜
- 周榜
- 月榜
 1
1
 2
2
 3
3
 4
5
6
7
8
9
10
相关攻略
4
5
6
7
8
9
10
相关攻略
 2015-03-10 11:25
2015-03-10 11:05
2021-08-04 13:30
2015-03-10 11:22
2015-03-10 12:39
2022-05-16 18:57
2025-05-23 13:43
2025-05-23 14:01
热门教程
2015-03-10 11:25
2015-03-10 11:05
2021-08-04 13:30
2015-03-10 11:22
2015-03-10 12:39
2022-05-16 18:57
2025-05-23 13:43
2025-05-23 14:01
热门教程
- 游戏攻略
- 安卓教程
- 苹果教程
- 电脑教程































 热门话题
热门话题
