




EndoDDC扩散模型实现内窥镜稀疏到稠密深度重建

机器人领域顶级学术会议IEEE国际机器人与自动化会议(ICRA 2026)传来喜讯,香港中文大学任洪亮教授团队的研究成果《EndoDDC:通过扩散深度补全实现内窥镜机器人导航的稀疏到稠密重建》成功入选。该研究精准切入微创手术中的关键技术瓶颈,为提升内镜机器人的自主导航精度与可靠性提供了创新解决方案。
论文题目:EndoDDC: Learning Sparse to Dense Reconstruction for Endoscopic Robotic Na vigation via Diffusion Depth Completion
论文作者:林胤恒†(香港中文大学),黄一鸣†(香港中文大学),崔贝雷(香港中文大学), 白龙(阿里巴巴达摩院,香港中文大学), 高沪昕(香港中文大学),任洪亮(香港中文大学), 赖捷文*(香港中文大学)
论文简介
在微创外科手术(MIS)中,内镜机器人的精准导航是提升手术操作精度、减少组织损伤并保障患者安全的关键。实现精准导航的核心前提在于获取高质量、高可靠性的三维深度信息。然而,内窥镜手术环境复杂,常面临组织表面弱纹理、镜面高光反射、动态流体干扰等挑战,使得传统的单目或双目深度估计方法效果受限,成为制约手术机器人智能化发展的技术难点。现有解决方案或严重依赖难以大规模获取的稠密深度标注数据,或在复杂真实内镜场景下鲁棒性欠佳,导致从稀疏点云到稠密深度图的重建质量难以满足临床导航需求。
为此,香港中文大学团队提出的EndoDDC方法,旨在攻克上述难题。该方法创新性地融合RGB图像信息、稀疏深度点云以及深度梯度特征,并引入先进的扩散模型(Diffusion Model)对深度图进行迭代优化,有效应对了内镜场景下弱纹理和反射干扰带来的深度估计不准问题。
主要贡献
EndoDDC的核心贡献在于,它专门为内窥镜场景设计了一套端到端的稀疏到稠密深度重建框架。该框架有效规避了传统监督学习方法对大量稠密标注数据的依赖,同时也解决了自监督深度估计中常见的尺度模糊问题。这意味着,系统仅需输入单帧RGB图像和对应的稀疏深度测量点,即可输出高精度、细节丰富的稠密深度图,极大增强了其在真实手术机器人系统中的实用性与易用性。
方法的一大创新点是深度梯度融合模块(Depth Gradient Fusion Module)。该模块利用卷积门控循环单元(ConvGRU),以迭代方式融合深度值信息与深度梯度特征,为整个重建过程提供了精确的几何结构引导。这一设计对于恢复弱纹理区域(如光滑器官表面)的连续几何形状起到了至关重要的作用。
此外,研究团队提出了基于深度梯度条件的扩散模型(Depth-conditioned Diffusion Model)。该模型以初步预测的粗糙深度图为起点,利用提取的深度梯度特征作为条件,引导扩散模型的反向去噪过程,通过多轮迭代优化,最终生成全局一致且符合物理约束的高质量稠密深度图。
为了验证方法的有效性,研究在C3VD和StereoMIS这两个权威的公开内镜数据集上进行了全面评估。实验结果表明,在RMSE(均方根误差)、MAE(平均绝对误差)、REL(相对误差)和δ准确率(δ<1.25)等所有核心评估指标上,EndoDDC均显著超越了当前最先进的深度补全与深度估计方法。具体数据上,在C3VD数据集中,相较于此前最优的深度补全模型OGNI-DC,EndoDDC将RMSE降低了5.28%,MAE降低了7.84%。更为突出的是,即使输入深度点的稀疏程度在50至50000个点之间剧烈变化,EndoDDC依然能稳定输出高质量的深度重建结果,展现了其卓越的鲁棒性和广泛的适用性。

EndoDDC方法概览和可视化样例
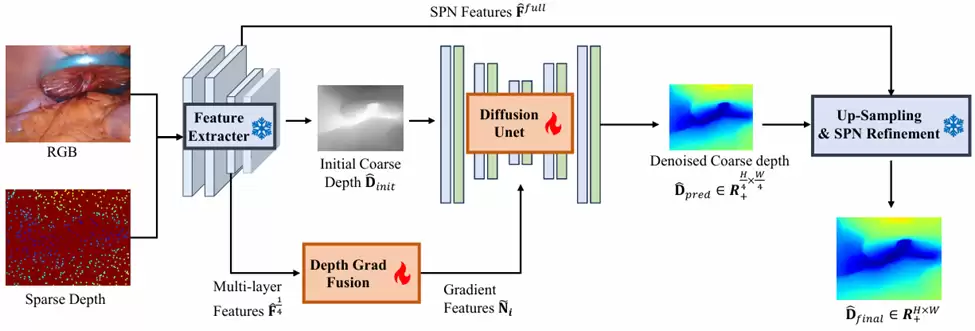
EndoDDC 概述:在从 RGB 图像和稀疏深度图提取特征后,Depth Grad Fusion 模块会基于深度和梯度特征迭代地更新状态隐藏网络。然后,将该输出输入到 Depth Diffusion 模型进行条件引导下的补全。

在 C3VD 和 STEREOMIS 数据集上与SOTA方法的深度补全结果比较。
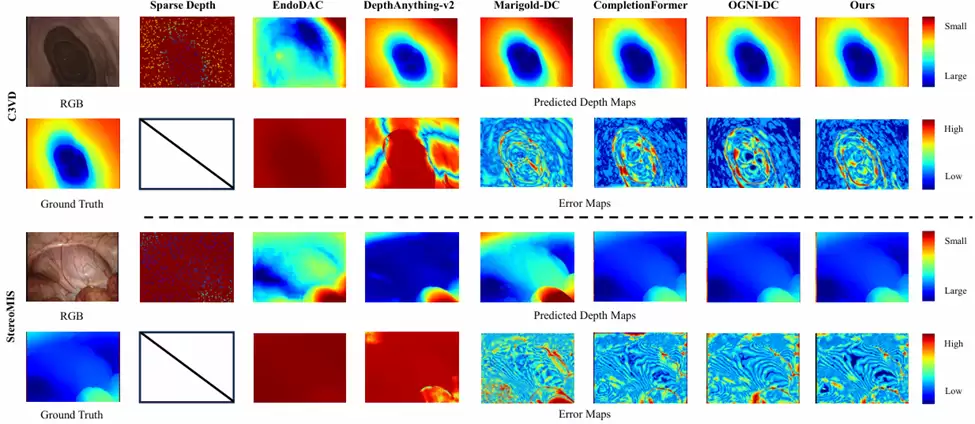
在 C3VD 和 StereoMIS 数据集上的比较。我们将 EndoDDC 与最先进的深度估计和深度补全方法进行比较;我们的方法在组织细节方面产生的误差更少。
参考文献
Lin, Y., Huang, Y., Cui, B., Bai, L., Gao, H., Ren, H. & Lai, J. (2026). EndoDDC: Learning Sparse to Dense Reconstruction for Endoscopic Robotic Na vigation via Diffusion Depth Completion. ICRA 2026.

游乐网为非赢利性网站,所展示的游戏/软件/文章内容均来自于互联网或第三方用户上传分享,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系youleyoucom@outlook.com。
 同类文章
同类文章

XREAL徐驰解读:智能眼镜如何成为AI个人助手最佳载体
在第六届BEYOND国际科技创新博览会上,一个关于未来科技趋势的明确信号被释放。XREAL创始人兼CEO徐驰在演讲中强调,智能眼镜正成为最具发展潜力的下一代标志性计算平台与AI应用入口。 这一判断基于清晰的产业逻辑。徐驰详细阐述了智能眼镜作为下一代AI个人助手理想载体的核心优势:其独有的第一人称视角

vivo Y600 Pro 配置曝光 10200mAh 超大电池续航惊人
中端手机市场的竞争向来激烈,但最近vivo投下的一枚“重磅冲击波”,着实让整个赛道为之一震。全新曝光的vivo Y600 Pro,以其10200mAh的超大容量电池为核心,配合旗舰级的屏幕与性能组合,彻底刷新了人们对中端机,尤其是续航型手机的固有认知。每一项配置都精准切中用户的实际需求,尤其是这“万

2026年学术笔记本电脑推荐 高效写论文与文献研究指南
对于长期与论文、文献为伴的学者和学生来说,笔记本电脑不仅是工具,更是延伸的大脑和书房。它的选择,直接关系到研究效率与工作体验。核心诉求其实很明确:续航要久,屏幕要舒适,性能要稳定,内存要够大。而2026年,随着英特尔第三代酷睿处理器的全面铺开,新一代笔记本在AI算力和能效比上的双重跃进,恰好精准地回

苹果MacBook Ultra旗舰曝光 OLED触控屏搭载M6芯片
苹果Mac产品线即将迎来一场颠覆性的全面革新。根据近期供应链及行业分析师的多方信息,一场被视作Mac电脑史上最大规模的硬件更新,预计将在2026年底或2027年初正式到来。此次升级的核心将锁定MacBook Pro系列,并有望引入一系列足以重塑高端笔记本市场格局的突破性技术。 显示技术的跨越:OLE

国产大模型Qwen3.7编程能力跻身全球第四
五月二十六日,阿里通义千问团队研发的Qwen3 7-Max模型,在国际权威编程能力评测平台Code Arena上取得了154分的优异成绩,位列全球第四。这一里程碑式的成就,不仅超越了Claude Opus 4 6等国际知名模型,更标志着国产大模型在代码生成、逻辑推理等核心编程任务上的综合实力达到了全








- 日榜
- 周榜
- 月榜
 1
1
 2
2
 3
3
 4
5
6
7
8
9
10
1
2
3
4
5
6
7
8
9
10
相关攻略
4
5
6
7
8
9
10
1
2
3
4
5
6
7
8
9
10
相关攻略
 2015-03-10 11:25
2015-03-10 11:05
2021-08-04 13:30
2015-03-10 11:22
2015-03-10 12:39
2022-05-16 18:57
2025-05-23 13:43
2025-05-23 14:01
热门教程
2015-03-10 11:25
2015-03-10 11:05
2021-08-04 13:30
2015-03-10 11:22
2015-03-10 12:39
2022-05-16 18:57
2025-05-23 13:43
2025-05-23 14:01
热门教程
- 游戏攻略
- 安卓教程
- 苹果教程
- 电脑教程































 热门话题
热门话题
