




乐高Mindstorms射击机器人:从2D方案到3D构建完全指南

乐高 Mindstorms EV3 平台为机器人爱好者与教育工作者提供了一个强大且易于上手的开发环境,借助模块化积木、多种传感器及可视化编程工具,能够搭建形态各异的智能机器人,并赋予其完成特定任务的能力。本文将系统性地介绍如何基于乐高 Mindstorms EV3 平台,设计并实现一款具备精准打击能力的射击机器人。我们将从最简单的单轴(一维)发射入手,逐步拓展至涵盖水平与垂直运动的二维发射,最终进阶到空间三维定位射击,全面解析每一阶段所涉及的力学原理、几何建模、运动学计算以及程序实现策略。通过本项目,你不仅能将课堂中的物理与数学知识落地为可运行的实体系统,更能深入体会工程实践中的系统集成思维与跨学科协同逻辑。这不只是一次积木拼搭体验,更是一场融合机械结构、自动控制、算法设计与科学建模的综合实践之旅。你,准备好了吗?让我们即刻启程,开启这场充满创造力与技术张力的乐高机器人探索之旅!
关键要点
深入理解一维、二维及三维射击场景下对应的运动学模型与受力分析。
熟练掌握乐高 Mindstorms EV3 硬件组装、传感器配置与图形化编程(EV3-G)的核心技能。
掌握初始发射速度、仰角、初相位等关键参数的推导方法与实测校准技巧。
探索 C++ 代码(如通过 ev3dev 或 RobotC 等环境)与 EV3 图形化编程平台之间的协同开发路径。
理解齿轮传动比在角度分辨率提升中的作用,并能根据精度需求合理选配齿轮组合。
在真实机器人系统中锤炼问题拆解能力、实验验证意识与迭代优化思维。
一维射击:基础理论与实践
一维射击的运动学建模
在着手搭建射击机器人前,必须厘清其底层物理机制。所谓一维射击,特指弹射体仅沿竖直方向做匀变速直线运动,主要受恒定重力场影响。要达成目标命中,首要任务是明确:当靶标位于某一固定高度时,应以多大初速度、何种姿态进行发射。
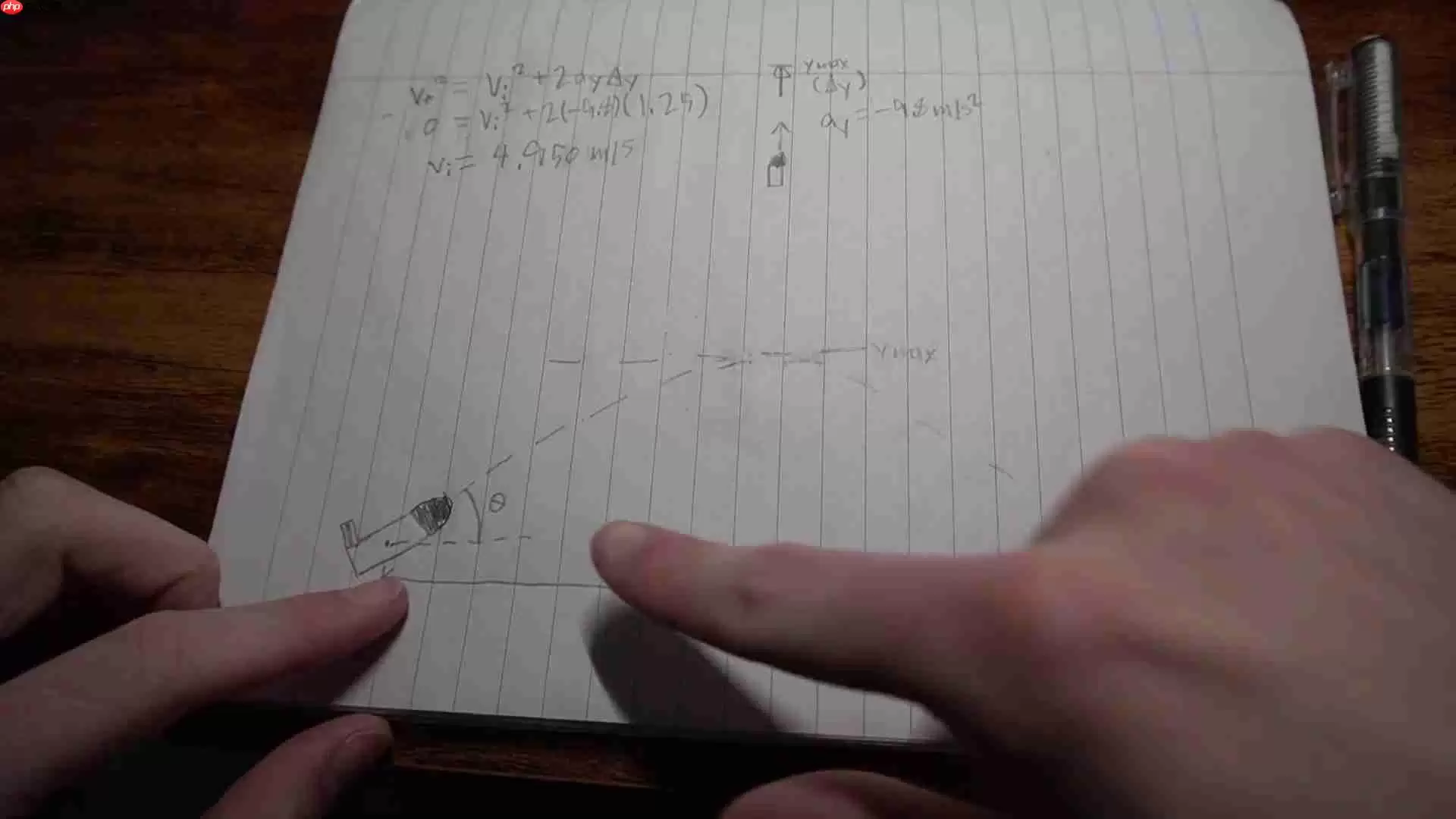
初速度的实验测定: 实现精准打击的前提,是准确获知飞镖的出膛速度。一种可靠方式是令发射装置垂直向上击发,测量其上升过程所能达到的最大高度 $ h $ ,再结合自由落体运动规律反推初速。依据匀变速直线运动公式:
vf² = vi² + 2 * a * Δy其中:
- $ vf $ 表示末速度(在最高点为 0 m/s)
- $ vi $ 为待求初速度
- $ a $ 为加速度(此处为重力加速度,取 -9.8 m/s²)
- $ Δy $ 为竖直位移(即实测最大高度)
若测得最大高度为 1.25 米,则代入可得:
0 = vi² + 2 * (-9.8) * 1.25→ vi = √(2 × 9.8 × 1.25) ≈ 4.95 m/s
发射角的理论解算: 在已知初速度的前提下,若需使飞镖命中某水平距离 $ R $ 处的目标,则须确定合适的发射仰角 $ θ $。此时需调用理想抛体运动的射程公式:
R = (vi² × sin(2θ)) / g- $ R $: 水平飞行距离
- $ vi $: 已知初速度
- $ θ $: 待求发射角
- $ g $: 重力加速度(9.8 m/s²)
对该式变形,即可解出角度表达式:
θ = 0.5 × arcsin((g × R) / vi²)只要给定目标距离,即可快速计算出对应的最佳发射角度。
齿轮比工程应用: 在实际机构中,电机输出的高速低扭矩旋转需经齿轮组转化为低速高精度的角度调节。合理选择齿轮模数与齿数比,可显著提升云台或发射臂的角度控制分辨率,从而保障瞄准稳定性与重复定位精度。
电机闭环控制实现: 借助 EV3 的内置编码器与电机控制模块,可将目标角度精确映射为电机转动圈数或步进角度。通过编写反馈调节逻辑(如比例控制),进一步抑制因摩擦、惯性或负载变化带来的偏差,确保每次发射姿态的一致性与可靠性。

游乐网为非赢利性网站,所展示的游戏/软件/文章内容均来自于互联网或第三方用户上传分享,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系youleyoucom@outlook.com。
 同类文章
同类文章

谷歌创始人回归组建AI编程攻坚团队
智东西编译 刘煜编辑 陈骏达 全球AI编程领域的竞争格局正在发生深刻变化。据The Information最新披露,谷歌内部已启动一项关键的战略调整。为应对Anthropic在AI编程模型方面取得的显著优势,谷歌紧急组建了一支由顶尖研究员与工程师构成的“突击团队”。尤为引人注目的是,公司联合创始人谢

萤石AI随身拍Pika发布 前后双4K摄像头智能拍摄
4月21日,萤石在杭州举办了一场以“驭智·向前”为主题的品牌新品发布会。这场发布会不仅带来了一系列硬核AI新品,更标志着品牌使命的一次重要升级——从“安全智能生活的主流选择”,转向“以安全的智能科技共创美好生活”。 AI CoreX:把“家庭智慧大脑”搬回家 发布会上的重头戏,当属萤石首款部署于家庭

具身智能两大世界第一揭秘 行业巨头探寻其真实身份
近期,世界模型领域动态频频,竞争日趋白热化。 李飞飞教授创立的具身智能公司 World Labs 高调发布了「Spark 2 0」模型;几乎同时,阿里巴巴也推出了自家的世界模型「快乐生蚝」。此外,Physical Intelligence 公司发布了新模型 π 0 7,重点强调了其在未见任务上的组合

荣耀机器人半马跑进前六 方飞解读技术积累如何水到渠成
近日,科技领域一则消息引发广泛关注:荣耀旗下人形机器人首次亮相亦庄半程马拉松赛事,便一举包揽赛事前六名。这一成绩背后,远非“跨界尝试”所能概括,其深层逻辑更值得探究。 荣耀终端产品线总裁方飞在解读此次表现时,提出了一个关键观点:与其称之为“跨界”,不如说是长期技术积累达到一定阶段后,“自然发生的技术

豆包机器人亮相马拉松引热议 抽象设计被调侃全身是腿
近日,2026北京亦庄机器人半程马拉松赛事现场,一款造型独特的机器人意外成为焦点,在网络上引发了广泛讨论。这款被网友昵称为“豆脚”的机器人,以其极具辨识度的外观和有趣的行走姿态,迅速走红。 “豆脚”机器人的创意来源于抖音平台的虚拟IP“豆包”。其创作者、抖音博主“同济子豪兄”基于高擎动力的小派机器人








- 日榜
- 周榜
- 月榜
 1
1
 2
2
 3
3
 4
5
6
7
8
9
10
相关攻略
4
5
6
7
8
9
10
相关攻略
 2015-03-10 11:25
2015-03-10 11:05
2021-08-04 13:30
2015-03-10 11:22
2015-03-10 12:39
2022-05-16 18:57
2025-05-23 13:43
2025-05-23 14:01
热门教程
2015-03-10 11:25
2015-03-10 11:05
2021-08-04 13:30
2015-03-10 11:22
2015-03-10 12:39
2022-05-16 18:57
2025-05-23 13:43
2025-05-23 14:01
热门教程
- 游戏攻略
- 安卓教程
- 苹果教程
- 电脑教程































 热门话题
热门话题
