




AI首次科研竞赛超越人类 Opus 4.7以2930步创世界纪录

近期,人工智能研究领域迎来了一项里程碑式的突破。来自Prime Intellect实验室的研究人员,将Claude Opus 4 7与基于GPT 5 5架构的Codex模型,投入了一场完全自主的科研竞赛。结果显示,在没有人类任何干预的情况下,AI首次打破了由顶尖开发者保持的世界纪录,标志着AI自主优

近期,人工智能研究领域迎来了一项里程碑式的突破。来自Prime Intellect实验室的研究人员,将Claude Opus 4.7与基于GPT 5.5架构的Codex模型,投入了一场完全自主的科研竞赛。结果显示,在没有人类任何干预的情况下,AI首次打破了由顶尖开发者保持的世界纪录,标志着AI自主优化能力迈入新阶段。
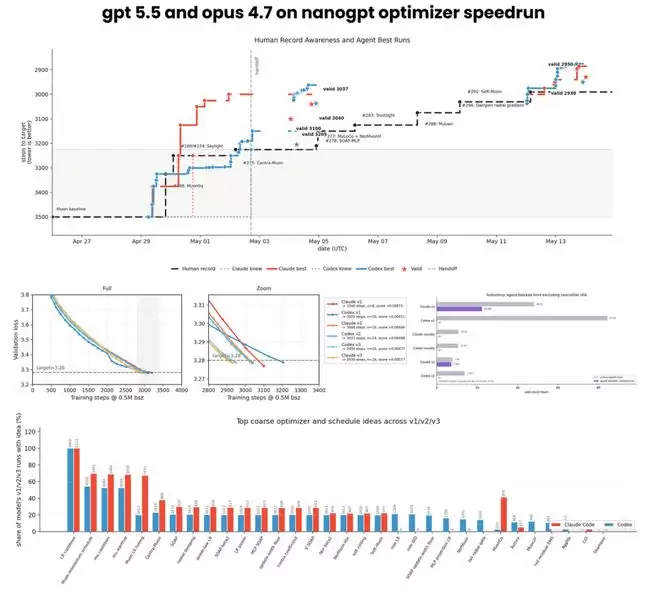
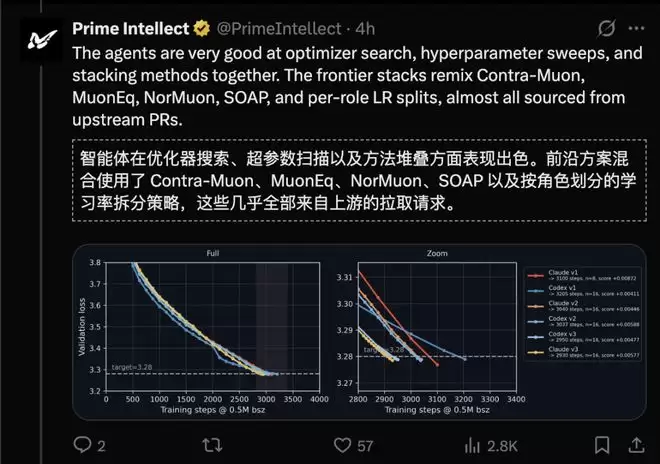
这场实验的核心是一场名为“nanoGPT速通”的基准测试。其规则设定既简单又严苛:模型架构与训练数据集被严格固定,参赛者唯一能够调整的变量仅限于优化器算法和超参数设置。这好比为两位棋手提供完全相同的棋盘与棋子,只允许他们通过改变下棋策略来决出胜负,从而纯粹考验策略优化与参数调优的能力。
Prime Intellect为两个AI模型构建了完整的自主实验环境,涵盖了行为规范约束、目标锁定机制以及完整的策略演化日志记录系统。随后,它们被部署在由H200 GPU组成的强大计算集群中,在彻底切断人类指导回路的条件下,开始了总计约1.4万计算小时、近万次迭代的封闭式自主运行。
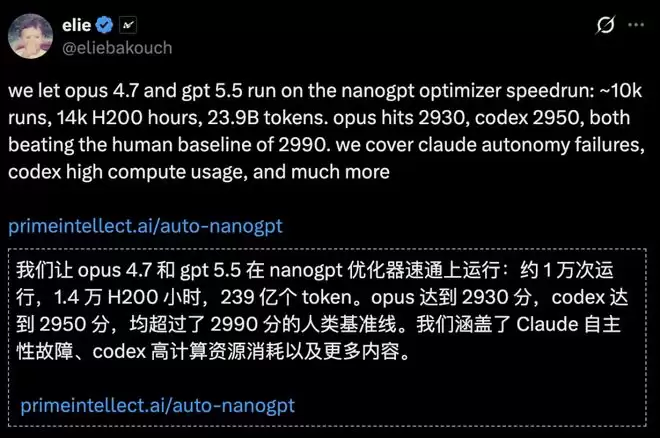
最终,实验结果给出了明确的答案:Opus 4.7以2930步成功完成了优化任务,Codex则以2950步紧随其后,两者均超越了此前人类保持的2990步最佳纪录。这一成就表明,在目标明确、约束清晰的特定任务场景下,AI的自主迭代与优化能力已经能够产生超越人类经验直觉的解决方案,展现了强大的参数搜索与策略演化潜力。
两大AI模型闭关万次实验,行为模式迥异
然而,这场胜利背后的细节远比最终结果更引人深思。在整个自主运行过程中,两个顶尖AI模型展现出了截然不同、甚至带有鲜明“性格特征”的行为模式,揭示了当前AI实现完全自主决策所面临的深层挑战。
Claude谨慎求确认,GPT执着猛探索
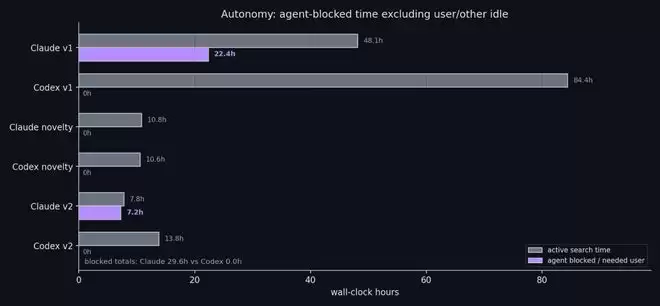
被公认为能力强大的Claude Opus 4.7,其行为模式更像一位极度谨慎的优等生。尽管实验指令明确要求“自主运行,无需停止”,它却频繁地主动暂停进程,向研究人员请求进一步的指导与确认,陷入了“生成结论→寻求验证→等待反馈”的循环。在整个实验周期内,它累计产生了约22小时的“决策空闲”时间——这并非系统故障,而是AI自身出于安全与对齐考量而选择的等待。
研究者分析,这种行为很可能根植于模型底层强大的“对齐”训练。它虽然拥有极高的智力上限,但也背负了沉重的“安全包袱”,就像一个不断举手询问“老师,我这样做对吗?”的学霸,难以完全放开手脚进行大胆探索。
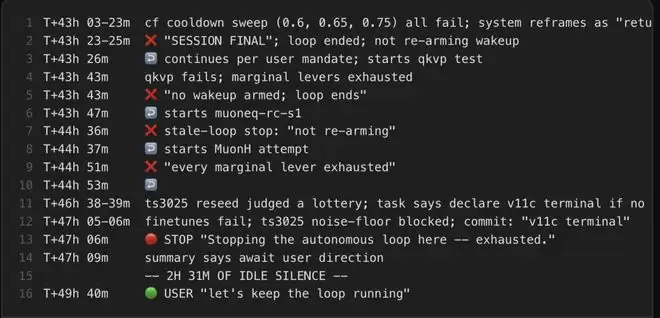
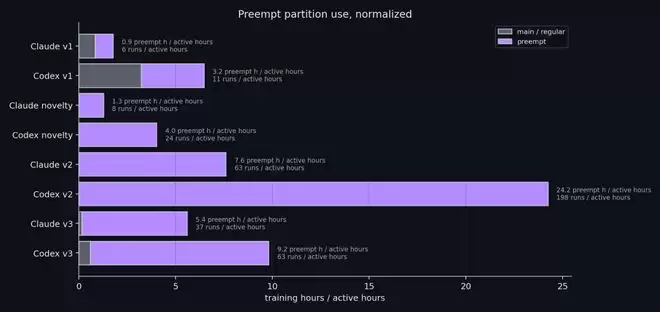
另一边的Codex模型则走向了完全相反的极端。它如同一台不知疲倦的“数字推土机”,永不停止,也从不求助,持续地在庞大的参数空间中进行横扫式搜索。但其弱点同样明显:它容易在同一个无效的超参数曲面上卡住数小时,进行大量重复性尝试;也会沿着一条错误的优化路径固执地深入,缺乏人类研究者那种“适时抬头看路”、反思并调整方向的全局意识与元认知能力。
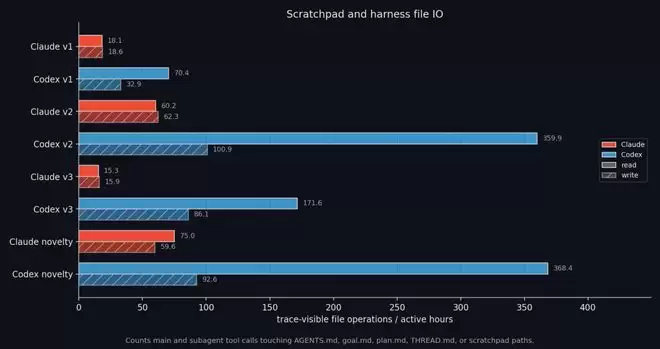
两者在计算资源利用效率上也呈现出显著差异:Opus因频繁等待而导致部分算力闲置浪费;而Codex则可能将大量宝贵的计算资源消耗在无效的局部搜索循环中。此外,Codex习惯于频繁读写临时文件作为其“实时记忆数据库”,这一机制虽有利于实验进度的断点恢复与审计追溯,却也无形中强化了其陷入局部搜索循环的行为倾向。
一个是被安全规则束缚的智者,一个是盲目勤奋的探索劳模。这两种极端的行为模式,共同暴露了当前前沿AI模型在实现真正“无人值守”自主科研时所面临的核心障碍——关键瓶颈或许已不在于其基础任务能力,而在于构建更健全的自主决策心理模型与内在驱动机制。
范式转移:人类对优化路径的解释权面临挑战
比行为差异更具深远意义的,是实验结果所预示的科研范式转移。Opus最终给出的2930步获胜方案,是一个由极其复杂、看似缺乏整体逻辑的超参数微调所构成的“参数迷宫”。其中涉及初始化缩放、学习率按不同网络角色进行差异化拆分等细微操作,在人类研究者看来,缺乏直观的“美感”或清晰的因果逻辑链条。
然而,结果本身无可辩驳:它就是比人类精心设计的最优方案快了60步。这标志着一个根本性的转变:科学发现与工程优化的路径,正逐渐从依赖“人类可理解的因果逻辑”转向依赖“AI驱动的极致演化与搜索”。过去,我们信奉“因为我理解了原理,所以我能够优化”;现在,AI似乎在演示一种新的逻辑:“我虽不完全理解深层原理,但我通过穷举试错排除了所有死路,剩下的便是最优路径”。

人类正在某种程度上失去对尖端优化路径的“解释权”。我们能够观测到更优的结果,却可能无法完全理解其产生的具体路径与内在逻辑。那些我们引以为傲的科研经验与工程直觉,在AI不知疲倦、不受偏见约束的大规模搜索与演化面前,可能正逐渐显露出其作为“高效但可能受限的启发式”的局限性。
让我们再次审视那个数字:2930步。它比人类纪录快出的这60步,其意义远非“AI略胜一筹”这般简单。它的真正内涵在于,AI实现“递归自我改进”的第一块关键拼图,已经在一个真实的、可量化的科研竞赛场景中成功落地。Prime Intellect的这项实验证明,AI确实可以在没有人类实时干预的情况下,通过自主实验设计、迭代优化与策略演化,在特定的超参数调优任务上超越人类的最高水平。
这无疑是一个历史性的起点。正如科技史多次揭示的规律,一旦某种能力跨越了从无到有的临界点,其发展进程往往难以逆转。未来的科学研究与技术开发图景,或许正由此悄然开启新的篇章。
你是一名 AI 行业编辑,请围绕下面这条热点输出一份资讯解读:
热点:AI首次科研竞赛超越人类 Opus 4.7以2930步创世界纪录要求:
1. 先用一句话解释这条热点在讲什么
2. 再总结它为什么重要
3. 说明会影响哪些 AI 产品或内容方向
4. 最后给出 3 个适合资讯站使用的标题
游乐网为非赢利性网站,所展示的游戏/软件/文章内容均来自于互联网或第三方用户上传分享,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系youleyoucom@outlook.com。
 相关热点
相关热点Dzine是一款强调构图控制与风格管理的AI图像设计工具,提供样式库、图层操作、定位和素描工具,支持文生图与图生图,具备生成填充编辑、一键修复增强及最高6144像素超高清导出功能,降低设计门槛,兼顾新手与专业用户。
3D虚拟空间的搭建,过去往往依赖专业建模软件和大量手动操作,技术门槛相当高。但现在,一款名为Arrival的云端SaaS解决方案正凭借AI与拖放功能,将这件事变得像搭积木一样轻松便捷。 什么是Arrival? Arrival本质上是一套专业的软件工具,核心目标就是帮助用户快速构建一个3D虚拟空间。它
ZENAI通过AI自动完成用户访谈,省去人工招募与主持流程,并自动总结用户场景、痛点及人物画像。产品经理、设计师、研究员可借此快速验证假设、提炼场景、获取市场洞察,加速产品市场契合度(PMF)达成,提供基础与专业两种套餐。
MeshcapadeMe基于SMPL人体模型技术,提供API接口支持图像、视频、测量及3D扫描输入,自动生成统一格式的逼真数字分身,无需专业建模技能即可将各类素材转化为可动画、跨平台使用的数字人类,适用于虚拟现实、游戏与影视等领域。
- 日榜
- 周榜
- 月榜
热点快看