




对话孙宇教授解析大语言模型在机器人任务规划中的应用

在工业自动化领域,机器人“四大家族”凭借深厚的技术积累早已确立领先地位。然而,当我们将视线转向日常生活,服务型机器人的发展历程则相对短暂,面临的挑战也更为复杂多元。
以烹饪场景为例,厨房作业的复杂性远超结构化工业流水线。火候的精准控制、食材的千变万化,这些高度依赖人类直觉与经验的环节,使得烹饪机器人的研发长期面临瓶颈。但变革正在发生。回顾2022年北京冬奥会,智慧餐厅内的烹饪机器人已能娴熟烹制各类中西菜肴。行业分析数据同样预示强劲增长:预计到2026年,全球烹饪机器人设备市场规模将突破1亿美元,年均复合增长率保持在20%左右。
这一技术突破的背后,大语言模型(LLM)扮演了关键角色。它为人机交互带来了范式革新。随着模型参数、训练数据与算力的大幅提升,大模型不仅提升了自然语言理解与生成能力,更展现出“涌现能力”——包括上下文学习、指令遵循与逻辑推理。这些能力使其成为机器人任务规划研究中一项强大的新工具。
南佛罗里达大学孙宇教授在机器人领域拥有超过二十年研究经验,其领导的机器人感知与行为实验室(RPAL)长期致力于让机器人理解并执行复杂指令。团队早在2015年便开始探索知识图谱在任务规划中的应用。自去年起,他们重点研究将大语言模型集成于烹饪机器人规划系统,相关成果已发表于国际期刊《人工智能与机器人研究》(IJAIRR)。
基于知识网络的机器人任务规划方法
机器人任务规划,本质上是为机器人制定一系列动作序列,使其能在动态环境中安全、高效且准确地完成目标。这需要综合考量机器人本体能力、任务目标与环境约束,例如路径避障、工序优化以及行为可解释性等。
孙宇教授团队的核心基础是一个名为“面向功能对象网络”(FOON)的知识图谱系统。该系统如同机器人的“烹饪大脑”,通过分析网络视频与文本资料,学习并存储各类食材、厨具的功能属性与操作关联。经过人工校验与标注,FOON能提供高可靠性的任务规划。对于已知任务,它能给出完全正确的方案;对于相似任务,也能保证高度可信的结果。
然而,知识库的覆盖范围终究有限。当遇到完全超出FOON知识范畴的创新性任务时,这一封闭系统便可能失效。这正是传统知识网络面临的普遍局限,而大语言模型的出现,为解决该问题提供了新的思路。

如何实现知识库外的创新任务规划?
那么,烹饪机器人该如何完成一项知识库中从未记录的任务?孙宇教授与Sadman Sakib博士的研究提出了创新方案:融合大语言模型的创造性联想与知识网络的结构化可靠性,实现优势互补。
该方法的核心流程如下:当用户输入烹饪指令后,研究团队通过精心构建的提示词,引导GPT-4生成多个不同的高级任务规划方案,并以“任务树”形式呈现。每棵树代表一种可能的执行路径,它们在资源消耗、步骤并行度与操作风险上各有差异。
随后,利用一个“图合并算法”将这些任务树融合为统一网络。通过对比分析,系统会自动剔除不合理部分(如成本过高的步骤),并将筛选后正确、高效的组件重新整合,最终输出一个优化后的解决方案。这一过程显著提升了规划的准确性与执行效率。
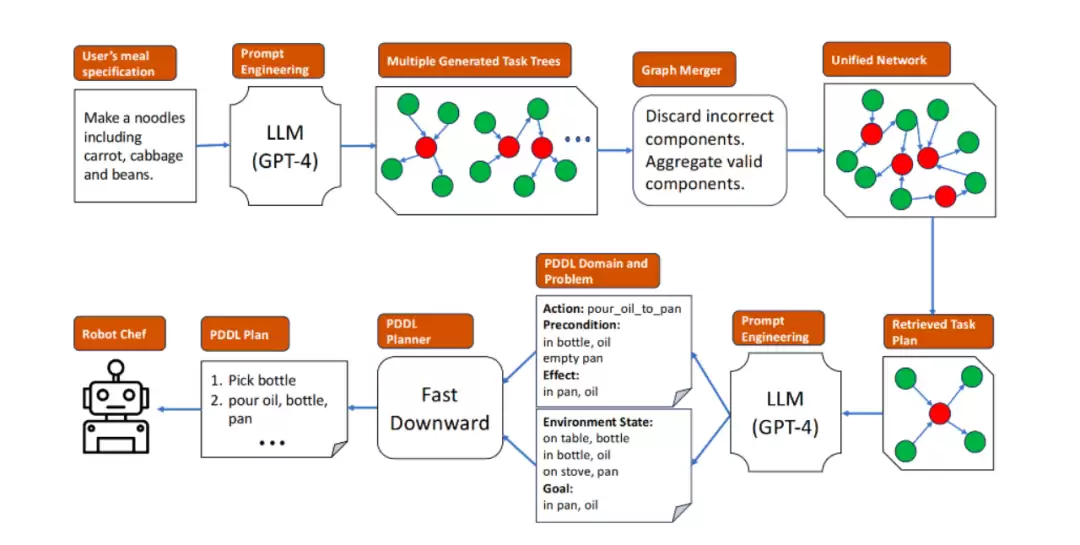
当然,机器人无法直接理解高级语义指令。此时,GPT-4还需承担“翻译器”的职责,将自然语言描述的最优计划,转化为用PDDL(规划领域定义语言)描述的低级可执行动作序列,从而将“制作一碗面”这样的抽象指令,分解为“抓取酱油瓶”、“向锅中倒入食用油”等机器人可执行的具体动作。
尤为值得一提的是,该研究还发现了合并任务树的衍生价值。当将多个菜谱对应的任务树合并成一个综合网络时,不同菜系的烹饪步骤与技巧相互交融,竟能衍生出全新的菜品制作流程。这意味着,该系统不仅能够复现经典菜肴,更具备创造新颖菜品的潜力,为烹饪创新提供了技术可能。
大语言模型与知识网络的协同互补
本质上,大语言模型与FOON知识网络形成了完美的能力互补。以GPT-4为代表的大模型,能够从开放互联网中汲取海量信息,生成富有想象力的任务规划,但其输出结果未经严格验证,准确性难以保证。而FOON中的规划树经过人工标注与校验,正确率可达100%,但知识覆盖面有限。
因此,一个高效的协作模式应运而生:首先利用大语言模型生成多个(可能包含错误的)任务树草案;随后借助FOON的结构化知识对其进行合并、验证与修正,剔除错误的功能单元,并以已验证的正确单元替代。从而在拓展创新边界的同时,确保了规划结果的可靠性。

该方法具备良好的泛化性能,其应用价值不仅限于厨房机器人。经过少量适配或无需调整,它即可为多种工作场景下的机器人(如清洁、物流、护理机器人)生成高效任务计划。
当然,挑战依然存在。当前机器人任务规划研究仍需解决执行失败时的自主纠错问题。当规划出现偏差或系统发生故障时,如何让机器人自主调整策略、回归正轨,是下一步的关键研究方向。孙宇教授团队未来将更注重环境反馈机制,尝试让机器人结合视觉传感与大语言模型,实时感知并更新环境状态,从而减少人工干预,实现更高层级的自主智能。

游乐网为非赢利性网站,所展示的游戏/软件/文章内容均来自于互联网或第三方用户上传分享,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系youleyoucom@outlook.com。
 同类文章
同类文章

微软AI新任CEO Mustafa Suleyman:DeepMind联创引领未来
DeepMind与Inflection联合创始人MustafaSuleyman加入微软,领导新成立的MicrosoftAI部门,其同事KarénSimonyan也将一同加入。Inflection作为明星AI初创公司,此前获微软领投,核心团队被整体挖走凸显了AI顶尖人才争夺的白热化。Mustafa职业生涯经历丰富,曾共同创立DeepMind并引发行业关注,其管

2026全球开发者先锋大会上海开幕倒计时5天
2024全球开发者先锋大会3月23日至24日在上海举行,主题为“模速空间”。大会涵盖前沿技术讲坛、互动体验及人才活动,汇聚国内外顶尖社区与投资机构,发布众多技术岗位。现场设沉浸式科技体验区,举办多场工作坊与竞赛,旨在促进开源协作与技术融合,为开发者提供交流与机遇平台。

专访方昱春教授:数据驱动的手语识别研究如何突破数据瓶颈
上海大学方昱春教授团队专注于数据驱动的手语识别研究,结合计算机视觉与深度学习技术,在多模态数据采集、孤立词与连续手语识别等方向展开工作,并探索与自然语言处理的融合。研究旨在为聋人群体提供应急、医疗等场景的数字支持,同时关注手语在认知机制研究中的价值。团队通。

对话孙宇教授解析大语言模型在机器人任务规划中的应用
大语言模型为机器人任务规划提供了新工具。研究将其创造性与知识网络的可靠性结合,通过生成多任务树、合并筛选,形成高效准确规划,能将高级指令转换为可执行动作,甚至融合步骤创新流程。两者优势互补,在开放创新的同时确保正确性,具备良好泛化能力。未来需关注自主纠错与环境。

国产3D视觉技术如何革新新能源汽车产业
国产3D视觉企业正迎来切入汽车制造领域的机遇。过去行业保守依赖外资,如今随新能源汽车产业崛起及国产技术成熟,凭借性价比与本土化服务优势,国产设备开始进入主流供应链。当前竞争加剧,企业需在细分领域错位发展。长远看,智能化需求广阔,但国产替代的核心仍是提升技术硬实力。








- 日榜
- 周榜
- 月榜
 1
1
 2
2
 3
3
 4
5
6
7
8
9
10
相关攻略
4
5
6
7
8
9
10
相关攻略
 2015-03-10 11:25
2015-03-10 11:05
2021-08-04 13:30
2015-03-10 11:22
2015-03-10 12:39
2022-05-16 18:57
2025-05-23 13:43
2025-05-23 14:01
热门教程
2015-03-10 11:25
2015-03-10 11:05
2021-08-04 13:30
2015-03-10 11:22
2015-03-10 12:39
2022-05-16 18:57
2025-05-23 13:43
2025-05-23 14:01
热门教程
- 游戏攻略
- 安卓教程
- 苹果教程
- 电脑教程































 热门话题
热门话题
