




AI视觉识别模糊的原因与解决方法

2026年5月提出的MoCam采用分阶段新视角合成方法:早期利用粗糙点云确定布局,后期切换至原始视频修正错误并补充细节。该方法解决了传统方式中几何与外观冲突导致的画面模糊问题,在静态与动态场景中均提升了生成质量与控制精度,为影视、虚拟现实等领域提供了新思路。
2026年5月,一项由多所顶尖高校及研究机构联合完成的重磅研究成果以预印本形式发布,论文编号为arXiv:2605.12119。这项研究精准地瞄准了计算机视觉领域一个极具挑战性的前沿课题:新视角合成。
简单来说,我们拍摄的每张照片、每段视频,都只是从一个固定角度观察世界的“二维快照”。若想自由变换观察角度——例如绕到物体背后观察,或从高空进行俯视——传统方法必须重新拍摄。那么,如果手头仅有一段普通的手机视频,能否让AI智能地“推理”并生成出那些从未被实际捕捉过的视角画面呢?这听起来如同魔术,但这项名为MoCam的创新研究,正是为了攻克这一技术难题。
其核心突破,在于巧妙地化解了一个长期困扰业界的根本矛盾:指导AI生成画面的“几何信息”(描述空间位置与三维形状)与“外观信息”(包含颜色、纹理与细节质感),这两种信号在本质上是相互冲突的,难以被简单粗暴地同时利用。MoCam提出的“分阶段接棒”策略,使得生成视频的画面质量与对摄像机运动的控制精度,均显著超越了当时的主流方法。
一、当AI尝试“变换视角”时,面临的核心挑战
设想这样一个典型场景:你用手机录制了一段朋友跳舞的视频,但镜头仅从正面拍摄。现在你希望看到他从侧面跳舞的样子,却没有任何侧面的素材。此时,你期望AI能仅凭这段正面视频,“推理”并生成出侧面的画面。
这项任务的难点在于,AI必须首先精准理解三维场景的空间结构——手臂、腿部以及背景中桌子的具体位置——然后才能将这个三维结构从全新的角度“投影”成二维图像。然而,仅从普通单目视频中“重建”三维结构本身就极不精确。使用单摄像头估计深度,如同仅用一只眼睛判断距离,误差难以避免。其结果是,AI重建出的三维点云(可理解为散落在空间中的彩色点阵)往往充满漏洞、扭曲和错误。
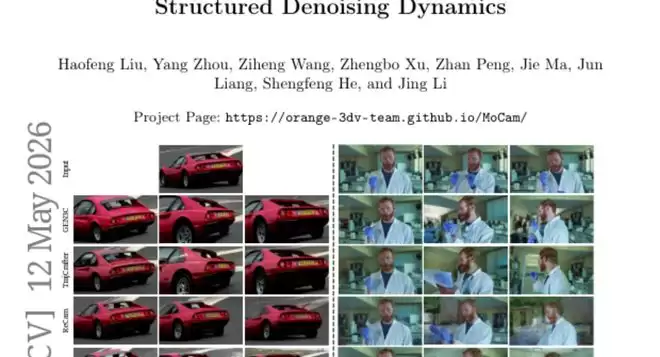
现有的主流方法大致分为两类。第一类是“为AI提供一张三维草图,令其依图绘制”:即先根据视频重建出粗糙的三维点云,渲染出新视角下的草图画面,再利用AI模型将这张“草图”补全细节。例如Gen3C和TrajectoryCrafter便属于此类。问题在于,若草图本身存在错误,AI在错误基础上进行“加工”,最终画面中人物的手臂可能发生扭曲,背景也可能出现诡异的破洞。
第二类是“直接告知AI摄像机如何运动,令其自行生成”:这类方法(如ReCamMaster)不依赖三维重建,而是将摄像机运动信息直接注入模型,期望AI自行推断新视角。但问题在于,当摄像机转动幅度过大时,AI极易“迷失方向”,生成的画面几何结构混乱不堪。
简而言之,前者知晓“空间在哪里”,但空间信息是错误的;后者知晓“摄像机如何动”,但对空间结构毫无把握。两种方法都卡在同一个根本矛盾上:几何信息与外观信息各有所长,却难以协同工作。
二、两种信号为何难以协同使用
MoCam的研究团队明确指出,矛盾的根源在于这两种信号存在本质上的冲突。
几何信息(由三维点云渲染的草图)的优势在于“空间定位”:它能明确新视角下物体的大致位置关系,知晓摄像机移动后,背景应出现在画面左侧还是右侧,人物应放大还是缩小。这是外观信息天生不具备的能力。但其劣势同样显著:由于深度估计不准,这张草图本身充满破洞和扭曲。若AI全程受其引导,这些错误将被“固化”到最终结果中,难以修正。
外观信息(原始参考视频)的优势在于“细节保真”:它提供了真实、清晰、丰富的纹理细节,人物的皮肤质感、衣物纹路、场景的光影变化均得以完好保存。但其劣势在于视角固定:它源自原始拍摄角度,与新视角不一致。若在生成早期就引入外观信息,AI会被原始视角的“视觉惯性”牢牢束缚,遗忘新视角应有的空间布局。
研究团队将这种冲突形象地描述为:早期若让外观信息主导,几何结构会发生漂移;晚期若仍让几何信息主导,其固有缺陷将被永久固化。两者若同时使用,则会相互干扰,导致信号混乱。这好比两位厨师同时烹饪一道菜,一位只负责调味,另一位只掌控火候,但理念截然不同——最终结果很可能既失风味,又欠火候。
三、MoCam的核心策略:先构建骨架,再填充血肉
MoCam的解决方案,本质上是一种“分阶段接棒”的智能策略。它借鉴了创作过程中的朴素直觉:先绘制草稿确定结构,再进行细化润色。
要深入理解此策略,需简要了解生成式AI(如Stable Diffusion、Wan系列模型)的工作原理。它们大多基于“扩散模型”。该模型的工作方式可作如下比喻:想象一张照片被逐渐撒上雪花(噪声),直至完全变成一片纯白,此过程称为“加噪”。扩散模型学习的是逆向的“去噪”过程——从一片纯白开始,逐步去除雪花,最终还原出清晰图像。
关键在于,在“去噪”的早期步骤(噪声尚多时),模型主要确定画面的大体结构和构图;到了后期步骤(噪声即将去除完毕时),才专注于处理衣物纹路、树叶形状、皮肤质感等精细细节。
MoCam正是巧妙地利用了这一特性。其策略是:在“去噪”的早期阶段,仅让AI参考几何信息(即那张粗糙的三维草图),用它来锚定新视角下画面的大致结构和空间布局;当画面的“骨架”稳固搭建后,在后期阶段切换至外观信息(原始参考视频),利用其真实丰富的纹理来修正早期骨架遗留的几何错误,并填充因视角变化而新出现的“空洞”区域。
简言之,几何信息在早期负责“定方向”,外观信息在晚期负责“修错误、补细节”。两种信号各司其职,互不干扰,而非同时争夺AI的注意力。这个切换的时间点由一个名为“Tswitch”的参数控制,研究团队通过实验将其设定为0.85,意味着在整个去噪过程进行到85%之前使用几何信息,之后则切换为外观信息。
四、MoCam的具体工作流程解析
MoCam的完整流程可分为三个环环相扣的步骤。
第一步,生成“空间草图”。 给定一段输入视频(或单张图片),系统首先使用深度估计模型分析每一帧,计算出每个像素距离摄像机的深度值。结合摄像机内部参数(如焦距),即可将二维像素“反投影”至三维空间,形成一团三维点云——好比一堆散落在空间中的彩色沙粒,记录了场景的空间结构。接着,按照用户指定的新摄像机运动轨迹,将这团点云从新视角“投影”回二维画面,得到一段粗糙的“草图视频”。这段视频在空间和运动上是对齐的,但充满了破洞和变形。
第二步,对两种信号分别编码。 系统使用一个称为VAE(变分自编码器)的工具,分别将草图视频和原始参考视频压缩成紧凑的数学表示(可理解为“高度压缩的视频精华”)。草图视频的压缩版称为“几何条件”,参考视频的压缩版称为“外观条件”。这两种条件信号将在不同阶段被送入核心的生成模型。
第三步,阶段性生成目标视频。 生成模型从一团纯噪声(全是“雪花”的状态)开始,按规则进行去噪:在前85%的步骤中,仅接受“几何条件”的引导,逐步形成具有正确空间布局的粗糙画面;在后15%的步骤中,切换为仅接受“外观条件”的引导,对画面进行精细修正和纹理填充,最终输出清晰完整的目标视角视频。
值得一提的是,这套流程对静态场景(单图重建多视角视频)和动态场景(运动视频重新渲染为新角度视频)同样适用。对于单张图片,系统只需将其复制成多帧,当作一段“静止视频”来处理,后续步骤完全一致。这种统一性正是研究的亮点之一——同一套方法,同时攻克了3D(静态)和4D(动态)两类新视角合成问题。
五、实验验证:数据揭示的性能优势
研究团队在多个标准数据集上进行了大量实验,将MoCam与当时最先进的几种方法,包括Gen3C、TrajectoryCrafter(论文中称TrajCrafter)、ReCamMaster(论文中称ReCam)以及ViewCrafter进行了全面比较。
评估维度相当全面:背景一致性(生成视频背景是否稳定)、主体一致性(画面主体在不同视角下外观是否连贯)、成像质量(画面清晰自然程度)、FVD-V分数(衡量生成视频与真实视频的感知差距,越低越好)、CLIP-V分数(衡量不同视角间的视觉相似性,越高越好),以及旋转误差和平移误差(衡量摄像机运动轨迹的准确度)。
在静态场景的单视角3D重建任务中,MoCam在几乎所有指标上都取得了最优成绩。尤其是FVD-V分数,MoCam为255.16,而排名第二的Gen3C为289.37,差距明显。CLIP-V分数方面,MoCam达到0.87,也高于其他方法。旋转误差上,MoCam以1.35度与Gen3C的1.36度基本持平,均优于ReCamMaster的2.13度。
在动态场景的4D重新渲染任务中,结果同样突出。背景一致性(0.9332)、主体一致性(0.9247)、成像质量(0.6932)均优于所有对比方法。在另一个专用于视频重建的iPhone数据集上(该数据集提供真实多视角参考,可用PSNR、SSIM等像素级指标评估),MoCam的PSNR达到14.60,明显优于TrajCrafter的13.74和Gen3C的12.36;FVD分数为180.35,远低于其他方法(Gen3C为260.15,TrajCrafter为273.36,ReCamMaster为301.41)。
特别具有说服力的是“抗几何退化”实验。团队故意让摄像机进行越来越大幅度的旋转——从30度一路增加到90度——以模拟几何信息越来越稀疏、不准确的极端情况。90度旋转意味着摄像机几乎绕到物体背面,点云数据大量缺失,草图视频几乎全是破洞。在这种压力测试下,Gen3C和TrajCrafter的各项指标随旋转角度增大而急剧下降;ReCamMaster虽不依赖点云,但因缺乏几何骨架约束,在大旋转下几何结构完全崩塌;而MoCam的各项指标曲线则明显平稳得多,在90度旋转下仍能保持相对较高的生成质量。这正是MoCam设计的关键所在:早期几何锚定防止漂移,晚期外观修正弥补点云的稀疏缺陷。
六、消融实验:验证核心设计的必要性
为了验证“阶段性切换”这一核心设计的必要性,研究团队专门进行了一组消融实验,逐一测试去掉某个关键组件后的效果。
“仅使用几何条件”的变体: 从头到尾只让AI参考草图视频。结果成像质量分数仅为0.4807,是所有变体中最差的。几何错误被彻底固化,导致人物和场景严重变形。
“几何条件仅用于早期”的变体: 前半段使用几何条件,后半段不使用任何条件。这避免了几何错误固化,但后期缺乏外观信息引导,AI只能依靠自身“脑补”细节。结果画面纹理模糊,那些原始视角看不到、新视角才出现的遮挡区域,生成的内容显得平庸且不自然。
“同时使用两种条件”的变体: 从头到尾将两种信号拼接在一起输入给AI。结果成像质量尚可,但旋转误差高达2.71度,平移误差高达11.01,意味着AI在摄像机运动方向上完全判断错误。原因正是两种信号的摄像机运动方向相互矛盾,造成严重干扰,让AI既想跟随草图指引,又被原始视频视角拉扯,最终迷失方向。
只有MoCam完整的“阶段切换”设计,综合了所有指标的最优表现:成像质量0.6932,旋转误差1.36度,平移误差5.12。这组实验清晰地证明,既不能全程依赖几何信息,也不能全程依赖外观信息,更不能同时依赖两者——阶段性切换,是唯一有效的解法。
此外,团队还在Wan2.1(而非主要使用的Wan2.2)骨干模型上测试了相同方法,结果同样优秀,证明这套策略与具体的视频生成模型架构无关,具备较好的通用性。团队还测试了当深度估计本身出现误差时MoCam的表现:即使草图中的物体形状因深度错误而发生扭曲,MoCam仍能在最终输出中将其修正,而对比的“同时使用两种条件”方法则无法完成这种修正。
七、这项研究的深远意义与启示
归根结底,MoCam在一个普遍认为“两种信息必须融合”的难题上,提出了一种更精妙的思路:不是强行融合,而是有序排队。就像一个优秀的导演,不会让摄影师和美术师同时对一个场景争论不休,而是先让美术师搭建好布景(确定结构),再让摄影师调整灯光、补充细节(精细修饰)。这个顺序,决定了最终成果的品质。
从应用前景看,这项技术的成熟意味着,未来影视制作中的虚拟摄像机重定位(利用一段普通视频生成不同角度的专业级画面)、虚拟现实内容的批量高效生成,乃至普通人使用手机视频自由调整“拍摄角度”的个人应用,都将变得更加可行。当然,当前版本仍有局限,研究团队在结论中也提到,未来可能会探索草图与视频的联合迭代优化,让两种信号在生成过程中能够相互反馈、共同演化,而不仅仅是简单的阶段切换。
对更广泛的读者而言,这项研究或许提供了一个直观的启示:当两种关键信息相互冲突时,与其强行融合,不如深思“谁在哪个时刻最有用”。有时候,时机和顺序,比简单的合并更为重要。
Q&A
Q1:MoCam方法与Gen3C、TrajectoryCrafter等旧方法相比,最根本的区别是什么?
A: 旧方法要么全程依赖存在错误的三维点云草图(导致几何错误被固化),要么将草图和原始视频同时输入给AI(导致信号相互干扰)。MoCam的根本区别在于将生成过程明确划分为两个阶段:前期仅使用草图锁定空间结构,后期切换为仅使用原始视频修正错误、补充细节。这种“有序排队”而非“强行融合”的思路,让两种信号在各自最合适的时机发挥作用,有效避免了相互干扰。
Q2:MoCam处理单张图片和处理视频的方式有何不同?
A: 本质上没有不同。对于单张图片,系统只需将其复制成N帧,当作一段“完全静止的视频”来处理,后续的深度估计、点云重建、阶段性扩散生成流程完全一致。这也是MoCam能够“统一”处理3D(静态)和4D(动态)两类问题的核心——同一套逻辑框架,无需为不同输入类型进行特殊设计。
Q3:MoCam的“阶段切换时间点”是如何确定的?如果切换过早或过晚会怎样?
A: 研究团队通过大量实验将切换点设定在整个去噪过程的85%处(参数Tswitch=0.85)。如果切换过早(几何阶段不充分),空间结构尚未稳定就引入外观信号,画面容易出现几何漂移;如果切换过晚(几何阶段过长),点云草图中的错误会被深度“烤入”画面,后期的外观修正将无能为力。0.85这个值是在验证集上通过实验经验选定的,未来研究可能会探索更动态、自适应的切换策略。

游乐网为非赢利性网站,所展示的游戏/软件/文章内容均来自于互联网或第三方用户上传分享,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系youleyoucom@outlook.com。
 同类文章
同类文章

小米回应新车未上市被曝起火实为SkyNomad遭AI污染
小米新系列尚未正式发布,搜索“SkyNomad”即出现“起火”“事故”等联想词及疑似AI生成的“车祸”视频。小米官方紧急辟谣,已收集相关证据并与平台沟通,指出这是利用AI技术批量造谣的有组织的舆论攻击行为。

沃尔玛沃集鲜推出药食同源系列新品
沃尔玛自有品牌沃集鲜推出“药食同源”系列,覆盖饮品、烘焙、零食等品类,分日常与衍生两大产品梯队,联合老字号拓展消费场景,同时加速全国门店升级,以商品力与门店网络推动全渠道增长。

聆思科技获近5亿元B轮融资
聆思科技完成近5亿元B轮融资,由安徽与合肥国资领投。资金将用于新一代端侧大模型AI推理芯片研发,从感知模型升级至认知大模型。首颗Nebula系列预计2026年底推出。公司已推出23款芯片,累计出货超1 5亿片,广泛用于家居家电、教育办公等领域。

北通鲲鹏70异环联名手柄上市安魂曲薄荷双色699元
北通鲲鹏70《异环》联名款手柄上市,售价699元,提供安魂曲与薄荷双色。礼盒内含定制手柄及周边,前12000套赠游戏道具兑换卡。手柄搭载AI触觉反馈肩键、双切扳机、阻尼可调摇杆,支持星闪2000Hz回报率,兼容PC、NS、手机和车机。

全球电动汽车需求持续增长趋势研究机构报告
6月全球电动汽车注册量连续第四个月增长,达200万辆,同比增7%。欧洲市场表现抢眼,注册量飙升31%,北美受税收政策影响下滑13%。德国车企面临挑战,保时捷上半年销量降16%,大众营业利润跌54%。








- 热门数据榜



 相关攻略
相关攻略
 2026-07-11 12:56
2026-07-11 12:55
2026-07-11 12:55
2026-07-11 12:54
2026-07-11 12:54
2026-07-11 12:54
2026-07-11 12:54
2026-07-11 12:53
热门教程
2026-07-11 12:56
2026-07-11 12:55
2026-07-11 12:55
2026-07-11 12:54
2026-07-11 12:54
2026-07-11 12:54
2026-07-11 12:54
2026-07-11 12:53
热门教程
- 游戏攻略
- 安卓教程
- 苹果教程
- 电脑教程
















