




高德开源ABot-M0具身操作基座模型 通用大脑适配多形态机器人

机器人领域迎来重大突破。高德地图正式宣布,将其自主研发的ABot-M0模型全量开源。根据官方定义,这是全球首个基于统一架构的机器人具身操作基座模型。其核心目标,是构建一个能够适配多种形态机器人硬件的“通用大脑”,从而推动机器人智能化迈入新阶段。 这一构想如何落地?从公开的基准测试成绩来看,ABot-
机器人领域迎来重大突破。高德地图正式宣布,将其自主研发的ABot-M0模型全量开源。根据官方定义,这是全球首个基于统一架构的机器人具身操作基座模型。其核心目标,是构建一个能够适配多种形态机器人硬件的“通用大脑”,从而推动机器人智能化迈入新阶段。
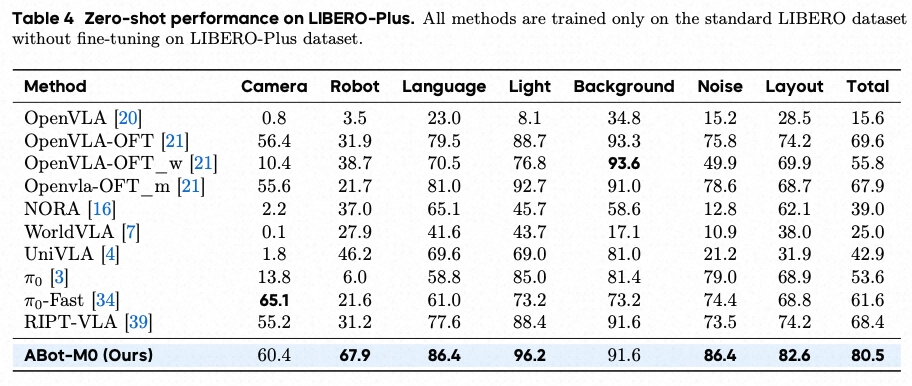
这一构想如何落地?从公开的基准测试成绩来看,ABot-M0表现卓越。在Libero、Libero-Plus、RoboCasa等国际权威机器人操作基准测试中,该模型均取得了SOTA(当前最优)性能。特别是在Libero-Plus基准上,其任务成功率高达80.5%。这一数据具有里程碑意义——相较于此前业界领先的Pi0方案,性能提升接近30%,标志着机器人操作模型技术实现了显著跨越。
开源的价值在于实际贡献。高德此次开源诚意十足,全面覆盖了数据、算法与模型三大核心层面。其根本目的在于,破解当前机器人研发中普遍存在的数据壁垒与部署困境,为行业提供一个具备先进空间理解能力、且能快速部署应用的通用技术基座。
数据层面:构建统一标准,破除信息孤岛
数据是训练AI模型的基石。本次开源的核心亮点之一,是同步发布了名为UniACT的通用机器人操作数据集。该数据集整合了超过600万条真实机器人操作轨迹,规模位居全球前列。更为关键的是,它提供了一套完整的、将原始异构数据转化为标准化训练数据的处理流程。
由于机器人厂商、传感器与控制接口各异,产生的数据格式千差万别,如同“方言”林立。UniACT通过统一动作表示、坐标系与控制频率,为所有机器人数据建立了一套标准的“普通话”体系。这使得全球范围内不同形态的机器人数据得以汇聚与高效利用,极大提升了大规模预训练的数据质量与模型效果。
算法创新:两项核心技术,解决行业痛点
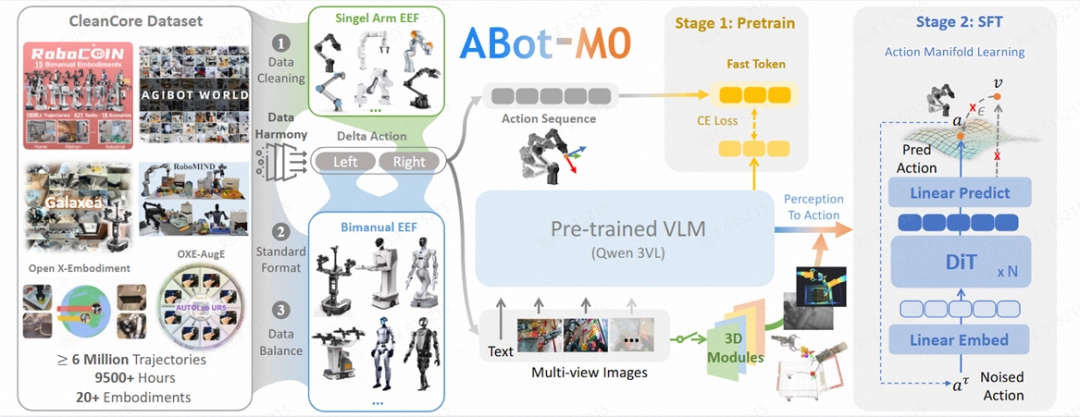
在算法开源部分,ABot-M0公开了完整的模型架构与训练框架,其中包含两项关键技术创新。
首先是动作流形学习算法。传统机器人动作预测方法常在噪声中摸索,导致策略不稳定。AML算法则另辟蹊径,它引导模型直接预测在物理上可行且平滑的连续动作序列。这相当于为机器人规划了更可靠的行为轨迹,不仅提升了动作解码效率,更确保了执行过程的稳健性。
其次是双流感知架构。现有视觉语言大模型虽擅长语义理解,却在三维空间与几何关系推理上存在短板。ABot-M0的创新架构巧妙解决了这一问题:它一方面利用如Qwen3-VL等先进VLM提供高层语义理解;另一方面,设计了一个“即插即用”的接口,可无缝接入专用的3D几何理解模块。这种设计无需改动骨干网络,就能有效增强模型对三维环境的深度感知能力,实现“语义”与“空间”理解的融合。
模型价值与行业愿景:通用大脑赋能万物互联
在模型交付层面,高德开源了端到端的预训练模型及全套工具链。对于开发者与研究人员而言,这意味着无需从零开始构建基础设施,即可基于此成熟底座,快速开发适用于工业自动化、家庭服务等垂直场景的机器人解决方案。
更深远的行业意义在于,ABot-M0成功验证了“单一智能大脑驱动多元物理躯体”的技术路径。它为未来形成“通用智能基座+专用执行载体”的产业范式提供了坚实的技术实证。若此路径得以普及,机器人技术的开发门槛将显著降低,商业化应用进程也将全面加速。
如果您希望深入了解这项机器人操作模型的开源进展,可通过以下资源获取详细信息:
- 论文标题:ABot-M0: VLA Foundation Model for Robotic Manipulation with Action Manifold Learning
- 项目主页:https://amap-cvlab.github.io/ABot-Manipulation
- 代码地址:https://github.com/amap-cvlab/ABot-Manipulation
- 论文全文:https://arxiv.org/pdf/2602.11236
你是一名 AI 行业编辑,请围绕下面这条热点输出一份资讯解读:
热点:高德开源ABot-M0具身操作基座模型 通用大脑适配多形态机器人要求:
1. 先用一句话解释这条热点在讲什么
2. 再总结它为什么重要
3. 说明会影响哪些 AI 产品或内容方向
4. 最后给出 3 个适合资讯站使用的标题
游乐网为非赢利性网站,所展示的游戏/软件/文章内容均来自于互联网或第三方用户上传分享,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系youleyoucom@outlook.com。
 相关热点
相关热点Dzine是一款强调构图控制与风格管理的AI图像设计工具,提供样式库、图层操作、定位和素描工具,支持文生图与图生图,具备生成填充编辑、一键修复增强及最高6144像素超高清导出功能,降低设计门槛,兼顾新手与专业用户。
3D虚拟空间的搭建,过去往往依赖专业建模软件和大量手动操作,技术门槛相当高。但现在,一款名为Arrival的云端SaaS解决方案正凭借AI与拖放功能,将这件事变得像搭积木一样轻松便捷。 什么是Arrival? Arrival本质上是一套专业的软件工具,核心目标就是帮助用户快速构建一个3D虚拟空间。它
ZENAI通过AI自动完成用户访谈,省去人工招募与主持流程,并自动总结用户场景、痛点及人物画像。产品经理、设计师、研究员可借此快速验证假设、提炼场景、获取市场洞察,加速产品市场契合度(PMF)达成,提供基础与专业两种套餐。
MeshcapadeMe基于SMPL人体模型技术,提供API接口支持图像、视频、测量及3D扫描输入,自动生成统一格式的逼真数字分身,无需专业建模技能即可将各类素材转化为可动画、跨平台使用的数字人类,适用于虚拟现实、游戏与影视等领域。
- 日榜
- 周榜
- 月榜
热点快看