




清华联合斯坦福推出具身世界模型Ctrl-World

Ctrl-World是什么
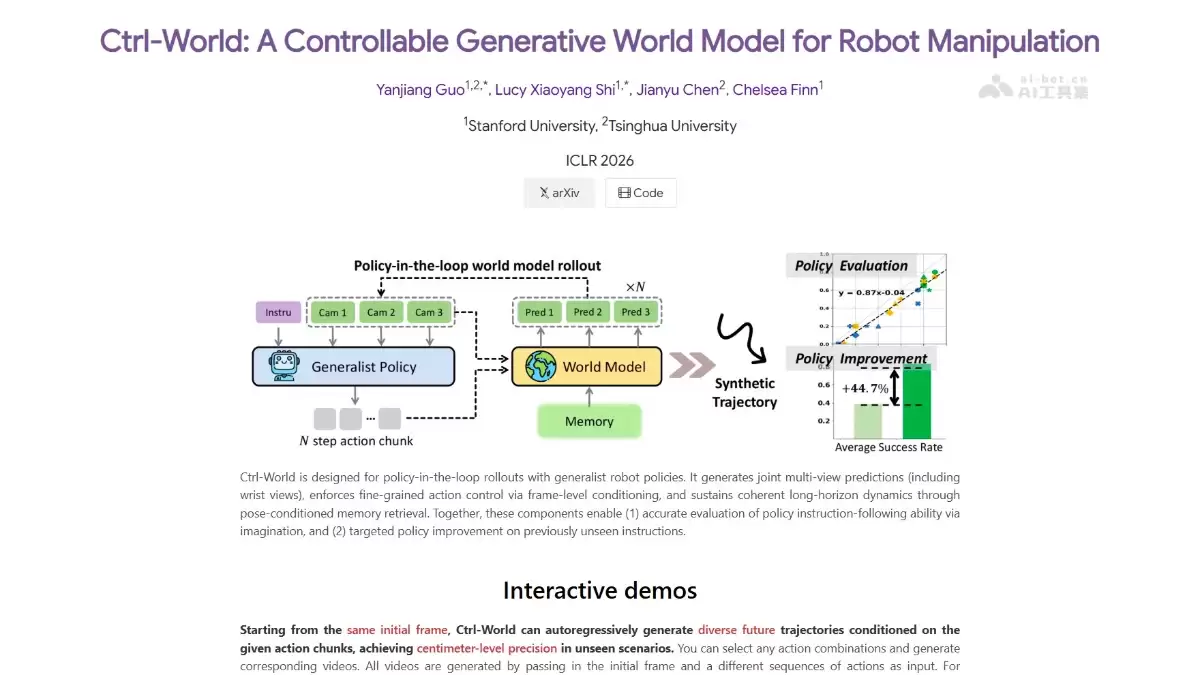
在机器人技术研发中,一个核心挑战是如何在虚拟仿真环境中,高精度地模拟真实物理世界的复杂规律。近期,由清华大学陈建宇团队与斯坦福大学Chelsea Finn团队联合研发的具身世界模型——Ctrl-World,为此提供了突破性解决方案。该模型在权威评测平台WorldArena上取得了卓越成绩:具身任务能力位列全球第一,视频生成质量高居全球第二。
Ctrl-World的独特之处在于其创新的设计理念。它采用了动作条件化架构,并将物理引擎的约束深度整合到模型学习中。具体而言,模型将机械臂关节角度、夹爪开合度等实际动作参数作为直接输入,强制模型学习动作与场景状态变化之间明确的因果关系。这一设计从根源上避免了物体穿透、不合理的隔空吸附等在仿真中常见却违背物理定律的错误现象。
其最终性能表现令人印象深刻:模型能够实现厘米级的运动轨迹精度,其策略评估结果与真实物理环境的一致性系数高达0.986,深度预测准确率也达到了0.93。这意味着,在Ctrl-World构建的高保真虚拟环境中进行测试,其结果可信度极高,几乎等同于在真实世界中的测试效果。它为机器人策略的训练与验证提供了一个可靠的“数字孪生”平台,有望显著降低从算法开发到实际部署的整体成本与技术风险。
Ctrl-World的主要功能
这个强大的“数字孪生”仿真平台,具体能为机器人研发提供哪些核心支持呢?其功能紧密围绕机器人开发的关键流程:
策略评估:这是Ctrl-World的基础功能。开发者可以将训练完成的机器人控制策略置于Ctrl-World生成的虚拟环境中进行系统性测试。得益于仿真环境与真实环境的高度一致性,评估结果极具参考价值,使得团队无需耗费巨资搭建实体测试平台,即可高效完成策略的初步验证与快速迭代。
动作规划:模型能够基于物理准确的仿真,为机器人生成一系列可执行的动作序列。这对于抓取、装配等需要精密操作的任务规划至关重要,并且支持在闭环控制框架下进行实时调整与优化。
数据合成:传统合成数据常因物理不合理而导致“仿真训练、真实失效”的领域适应性问题。Ctrl-World能够生成物理逻辑自洽的视频与动作配对数据,这些高质量数据可直接用于训练能够在真实世界中稳定运行的机器人策略,有效缓解了真实世界数据采集成本高昂、效率低下的瓶颈。
多视图预测:模型不仅能生成单视角的RGB视频,还能联合输出深度图、点云以及多视角观测信息。这相当于为机器人提供了完整的空间感知能力,是执行复杂三维操作和自主导航任务的重要基础。
Ctrl-World的技术原理
能够实现如此高水平的物理保真度,得益于以下几项关键技术的深度融合:
动作条件化架构:如前所述,这是模型的基石。它将机器人的动作参数作为明确的生成条件输入,强制模型学习“特定动作将引发场景如何变化”这一物理因果关系,从而确保生成的结果符合动力学规律。
物理引擎约束嵌入:为了使学习过程更高效、结果更准确,研究团队在模型训练中引入了物理引擎进行监督。牛顿力学定律被内化为模型的生成硬约束,确保输出的每一帧画面都严格遵守质量、摩擦、碰撞等物理守恒定律,而不仅仅是视觉上的逼真。
记忆增强的多视图预测:为了在长时序动作序列中保持场景状态的一致性,模型采用了稀疏历史帧检索与姿态条件化投影技术。同时,其联合预测框架能一次性输出多视角的RGB图像、深度图和点云结构,实现了精准的三维空间认知,这也是其能达到厘米级轨迹精度的核心技术保障。
Ctrl-World的项目地址
对于希望深入了解或实际应用该技术的研究人员与开发者,项目团队已公开了所有核心资源:
您可以访问其项目官网(https://ctrl-world.github.io/)获取概览介绍与技术演示视频。
全部模型代码、使用示例和详细文档均已开源在GitHub仓库(https://github.com/Robert-gyj/Ctrl-World)中。
详尽的技术细节与完整的实验数据则发表在arXiv技术论文(https://arxiv.org/pdf/2510.10125)上,供学术界同行深入研读与探讨。
Ctrl-World的应用场景
总体而言,Ctrl-World的落地应用潜力广泛覆盖了机器人技术从研发到实际部署的多个关键环节:
虚拟仿真测试:这是最直接的应用场景。无论是高校实验室还是工业研发部门,都可以利用它快速、低成本地验证机器人算法与控制策略的性能,从而大幅缩短研发周期。
策略训练数据合成:当面临特定场景真实数据匮乏的困境时,可以利用该模型生成大量物理逻辑合理的仿真数据,用于补充甚至替代部分高成本的实地数据采集工作,加速机器人策略的训练进程。
动作规划与闭环控制:在具体的操作任务中,例如工业流水线上的精密抓取与装配,Ctrl-World可以为机械臂生成高精度的动作序列,并能根据实时传感器反馈进行动态调整,实现智能化的闭环操作控制。
机器人技能学习:通过生成与多样化物体、在不同空间位置进行交互的仿真数据,可以帮助机器人学习更具泛化能力的操作技能,使其能够适应未曾见过的新物体、新环境和新任务指令,向更通用的机器人智能迈进关键一步。

游乐网为非赢利性网站,所展示的游戏/软件/文章内容均来自于互联网或第三方用户上传分享,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系youleyoucom@outlook.com。
 同类文章
同类文章

谷歌Nano Banana 2图像生成模型全面解析
什么是Nano Banana 2? 在竞争激烈的AI图像生成领域,谷歌DeepMind再次取得突破性进展。其最新发布的Nano Banana 2,是Gemini 3 1 Flash模型在视觉创作方向的专项强化版本。该模型的核心优势在于,深度融合了庞大的知识图谱与实时网络检索能力,使其不仅具备“绘画”

清华联合斯坦福推出具身世界模型Ctrl-World
Ctrl-World是什么 在机器人技术研发中,一个核心挑战是如何在虚拟仿真环境中,高精度地模拟真实物理世界的复杂规律。近期,由清华大学陈建宇团队与斯坦福大学Chelsea Finn团队联合研发的具身世界模型——Ctrl-World,为此提供了突破性解决方案。该模型在权威评测平台WorldArena

MiniMax OpenClaw 一键云端部署方案详解
MaxClaw是什么 如果你正在寻找一个能快速上手的AI智能体部署方案,MaxClaw值得重点关注。简单来说,它是MiniMax Agent平台推出的OpenClaw一键云端部署方案。最大的亮点是什么?彻底告别繁琐的服务器配置。用户只需点击几下,10秒内就能完成部署,真正实现了零技术门槛和零后期维护

阿里开源轻量向量数据库Zvec嵌入式应用指南
Zvec是什么 在构建AI应用时,高效精准的向量相似度检索往往是核心需求。然而,传统独立的向量数据库通常需要复杂的部署和运维流程,对于追求快速迭代和轻量化的开发团队而言,这套方案显得过于笨重。那么,是否存在一种更便捷的解决方案,能够像调用普通Python库一样轻松实现向量检索呢? 答案是肯定的。Zv

开源NanoClaw轻量AI助手安全替代OpenClaw
在开源AI助手领域,一个名为NanoClaw的项目正吸引着技术社区的注意。它被定位为OpenClaw的轻量级替代品,其核心设计理念围绕着安全与用户掌控展开。每个运行在其中的智能体(Agent)都被置于独立的沙箱环境中,仅能访问用户明确挂载的目录,从架构层面强化了隔离性。 NanoClaw的主要功能








- 日榜
- 周榜
- 月榜
 1
1
 2
2
 3
3
 4
5
6
7
8
9
10
相关攻略
4
5
6
7
8
9
10
相关攻略
 2015-03-10 11:25
2015-03-10 11:05
2021-08-04 13:30
2015-03-10 11:22
2015-03-10 12:39
2022-05-16 18:57
2025-05-23 13:43
2025-05-23 14:01
热门教程
2015-03-10 11:25
2015-03-10 11:05
2021-08-04 13:30
2015-03-10 11:22
2015-03-10 12:39
2022-05-16 18:57
2025-05-23 13:43
2025-05-23 14:01
热门教程
- 游戏攻略
- 安卓教程
- 苹果教程
- 电脑教程































 热门话题
热门话题
