




机器人集群可像凝胶分裂重组并涌现机械智能

康奈尔大学团队受自然启发,开发出仅靠魔术贴钩连的简易机器人集群。模块通过形变缓慢移动,在接触中动态连接与分离,形成自组织群体。该系统无需中央控制,依靠物理相互作用涌现出协同越障等集体智能,为极端环境下的稳健机器人系统提供了新思路。
想象一下这样的场景:洪水淹没了火蚁的巢xue,它们会迅速用身体互相钩连,在水面上形成一个能漂浮数周的“活筏”。再看土壤深处,丝状真菌的菌丝相互缠绕,构筑起稳固的支撑网络。甚至在微观的细胞内部,肌动球蛋白分子也在通过不断地连接、断开、再连接,让细胞既能保持形态又能灵活变形。
这些现象背后有一个共同的秘密:没有中央蓝图,也没有统一指挥。群体中的每个个体,未必知道自己正在参与建造什么。最终功能的实现,依靠的是身体的形状、彼此接触的方式,以及一种近乎物理本能的相互作用。
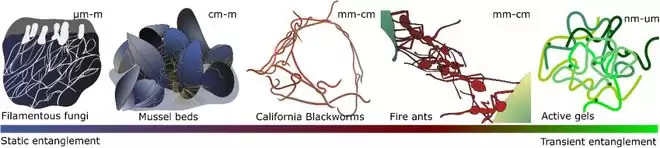
图 | 自然界中常见的纠缠网络(来源:DOI: 10.1126/scirobotics)
那么,这种由身体直接执行的“智慧”,能被机器人自发地领会吗?2026年5月20日,发表于《科学-机器人学》(Science Robotics)的一项研究给出了肯定的答案。康奈尔大学的工程师们展示了一群几乎无法独立移动的小型机器人,它们仅仅通过两端粘力微弱的魔术贴(Velcro)互相钩连、分开、再钩连,就能像一团会流动的物质一样,协同穿越斜坡和障碍。
研究人员将这套系统命名为“交联集群”(Cross-Link Collective),而其中起作用的底层机制,则被称为“机械智能”(mechanical intelligence)。
中央大脑的代价
在传统的机器人范式里,“更聪明”几乎总是与“更复杂的中央控制”划等号。这意味着需要更强大的算力、更精密的传感器和更可靠的通信网络。这套逻辑在受控的实验室环境里游刃有余,但一旦放到灾难废墟、未知地形或故障频发的极端环境中,其脆弱性便暴露无遗。
问题的核心在于“依赖”。当系统的决策权高度集中于某个控制层时,任何一处通信中断、传感器异常或个体失效,都可能成为导致整个系统瘫痪的瓶颈。这促使一部分研究者开始反思:智能,是否必须由“大脑”来承担?它能否部分地由身体本身的形状、材料特性以及接触方式来分担?
这条思考线索,将研究者引向了一个看似与机器人学相距甚远的领域:软物质物理。
在材料科学中,有一种“活性凝胶”,其分子之间通过动态的交联键相互连接。这些键不断断裂又重建,但整体网络却能始终保持结构和功能。细胞内部的骨架就是典型例子——它既支撑着细胞的形态,又能在分子层面随时被重塑。
康奈尔大学团队的灵感正源于此。他们试图构建一种“机器人物质”(robotic matter),其行为更接近一团能够变形、流动、自我组织的连续介质。它不是一个由许多小机器人构成的“大机器人”,也不是一组严格按程序执行的离散单元。
这恰恰与“具身智能”的核心主张相契合:智能不仅存在于算法中,也存在于身体的形态、材料的弹性以及与环境的互动方式里。研究人员想探究的是,如果把这一原则推到极致,让集群中的每个成员都简化到几乎没有计算能力,仅靠物理接触来自行协调,会发生什么?
事实上,回答这个问题的工作早在十年前就已开始。乔治亚理工学院的物理学教授丹尼尔·戈德曼(Daniel I. Goldman)的实验室,自2015年起开发了一类名为“Smarticles”(智能粒子)的小型机器人。每个Smarticle是一个14×2.5×3厘米的三连杆平面结构,由几个伺服驱动的小臂组成,能在“I”形和“Z”形之间反复切换。单独放置时,它们只能在原地小幅摆动,几乎无法定向移动。
有趣的现象发生了:当把若干个Smarticles约束在一个塑料环里时,它们彼此间的随机碰撞会让整个“超级粒子”(supersmarticle)作为一个整体缓慢漂移,甚至可以通过让某个单元停止活动来粗略控制方向。这一系列工作奠定了一个关键认识:单个单元不会走,集体也能动起来。
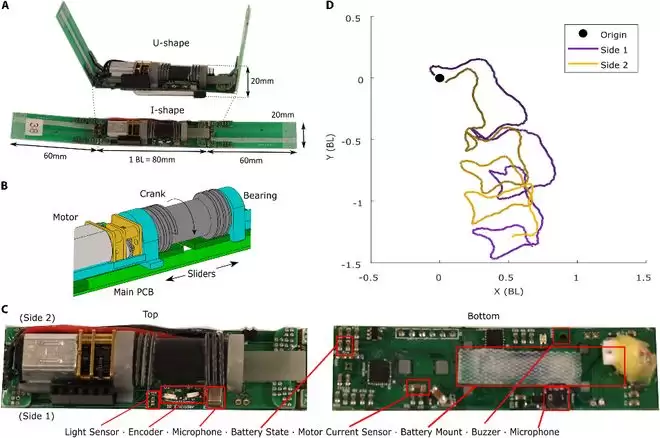
图 | 机器人模块设计(来源:DOI: 10.1126/scirobotics.aec6393)
但Smarticles有一个明显的局限:它们依赖外部约束(那个塑料环)才能形成有效的群体行为。一旦移除约束,群体就会四散。要让这种“机器人物质”真正自由地穿越复杂地形,必须找到一种更灵活、源自其内部的凝聚机制。
从“困在环里的智能”到交联集群
接过这一挑战的是康奈尔大学的集体具身智能实验室(CEI Lab)。该实验室由卡斯丁·彼得森(Kirstin H. Petersen)于2016年创立,专注于研究受社会性昆虫启发的集群机器人。
经过多年迭代,团队将原始的Smarticle改造成了一种新形态:长约200毫米、宽约20毫米的细长模块,由一个小型电机驱动,可以在伸直的“I”形和弯折的“U”形两种形态之间周期性切换。这种周期性变形会对地面产生交替的接触力,从而使模块缓慢蠕动并相互推挤。
新模块的形态选择经过了细致考量。其三连杆结构灵感源于“普赛尔最小游泳器”。1977年,物理学家爱德华·普赛尔(Edward M. Purcell)曾提出一个理论问题:在粘性主导、惯性可忽略的极端环境(如细菌生活的水中),一个游泳器至少需要多少个关节才能游动?他给出的答案是三个连杆、两个关节。少于这个数量,运动的对称性会导致净位移为零。
Cross-Link模块本质上是这一理论的“陆地版”:它通过周期性的形态变化,对地面产生不对称的接触力,从而让一个本身无法有效移动的物体缓慢挪动。这解释了它的运动机制——类似于电动牙刷底部或振动机器人的原理,依靠摩擦力的微小不对称,将对称的振荡转化为净位移。
此外,原版Smarticles在I形和Z形之间振荡,而新的Cross-Link模块改成了I形和U形。U形保持了沿模块纵轴的镜面对称,当多个U形模块相互连接时,整条链可以形成传播的行波,这正是在低惯性环境中最有效的运动模式之一。瘦长的形状也让模块能够在三维空间中真正“绞”在一起,这是实现自由流动的“机器人物质”的关键几何条件。
最关键的改动在机器人两端:每个模块的端部贴上了强度很弱的魔术贴。这个看似简陋的选择,却精准复刻了活性凝胶中“不断断裂、又不断重建”的动态平衡,是整个研究的物理逻辑核心。
魔术贴的布置也暗藏玄机。模块被分成Type I和Type II两种类型,钩面和绒面被反向布置。这意味着,同一类型的模块之间无法钩住,只有Type I和Type II靠近时才能形成交联。这是一种刻意的“异构化”,它保证了系统的连接是“概率性”的,而非永久固定的。
从强度上看,一个良好的连接大约能承受一个模块的重量。这个强度恰到好处:强到足以在运动中维持接触,又弱到能被群体相互推挤的力量拆开。正是这种动态特性,构成了“机器人物质”的交联键。
机械智能如何涌现
仅仅依靠上述结构改动,一群Cross-Link模块就表现出了令人意外的集体行为。
首先,在平整白板上的实验显示:将10个模块堆成一团,如果不贴魔术贴,模块间的接触会让它们快速散开,随后各自缓慢、随机地爬行。但贴上魔术贴后,画面完全不同了。模块们进入了“超扩散”状态:它们组成的链条几乎沿直线推进,后期运动轨迹接近纯弹道运动。统计显示,无魔术贴版本累计产生了55个落单模块,而有魔术贴版本只产生了15个。
当两个模块相遇时,可能形成四种基本构型:S形(蛇形)、W形(双谷)、G形和C形(双嵌套)。在实际观察到的所有自发两模块连接中,S形构型出现了13次,W形4次,G形3次,C形则为零次。基于阻力理论的力学分析揭示了原因:W形构型维持所需的扭矩远高于S形和G形,因此最容易被自身运动产生的力扯散。同时,细长流线型的S形作为一个多连杆游泳器,运动效率最高,类似于蛇蜿蜒前进时的形态。

(来源:DOI: 10.1126/scirobotics.aec6393)
当多个模块互相缠绕成链后,所有可能的构型都可能出现,但接触力学会自发“筛选”出更利于前行的构型。例如,那些能减小关节扭矩、降低内部应力的姿态,在物理上更易于维持,因此出现的频率也更高。换句话说,集群会自动收敛到对自己运动阻力最小、最“舒服”的形状。
值得注意的是,这里的“构型”不仅指空间上的连接拓扑,还包括时间上的振荡相位关系。小机器人组成的集体,不只在物理上排列出一种好走的形状,还会在节奏上逐渐将每个模块的形态变化对齐到一种能使整体内应力最小的节拍上。
整个系统没有任何一个部分担任控制中心,来决定该如何排列。但有用的排列方式会通过纯粹的物理筛选浮现出来。正如卡斯丁所概括的:让有益的行为从接触动力学中自然涌现,系统就会自动趋向于那些应力更小、运动更顺畅的状态。
在这一基本物理机制之上,研究者还引入了一点极简的计算——真的只有一点点。模块两端配备了触觉和声学两种收发器,构成了最低限度的成对感知-反馈通道。每个模块能够通过感知自身被推挤的程度,来推断自己是否仍处于群体内部。如果一个模块“计算”出自己没怎么被推挤,它就会“意识到”可能已经脱离群体,随即发出蜂鸣声。附近的模块听到后,会放慢运动速度,给它一个重新接入的机会。
需要明确的是,这种发声不属于精密通信协议意义上的信号。与主流多机器人系统中常见的网络通信、共享坐标或集中调度相比,它简陋得近乎“反常”。它在本质上就是一种广播式的物理扰动,谁听到了,谁就不得不放慢速度。但恰恰是这种简陋,使得它在面对个体故障时反而异常稳健。
不断分开又不断重组的“机器人流体”
为了检验这套系统的稳健性,团队设计了一系列实验场景。结果印证了他们的设想:当我们放弃对构型与协调的精确控制时,反而获得了惊人多样的有用行为。
在斜面测试中,团队在5°斜面上分别放置了5、10、15、20个模块。结果显示,10个模块是最优数量。少于这个数,难以形成足够多样的连接构型;多于这个数,模块之间容易互相阻塞,平均速度反而下降。
此外,单个模块在斜坡上的运动对其初始朝向极其敏感,常因姿态问题停滞不前。而一旦组成链条,这种依赖性就被显著抑制。因为链条会自然旋转,不会被任何单一姿态“卡住”。
在密集障碍物场测试中,集群展现出一种类似流体的行为。研究人员设置了间距略小于I形模块全长的圆柱障碍场。集群在进入障碍区前以单体为主,一旦进入,缠绕率立即上升。为了不被冲散,模块们更倾向于钩在一起。当某条链遇到无法通过的路径时,它会主动断裂,让模块以更小的子群体绕行,然后在另一侧重新聚合。整个过程,就像水流自动绕开石头一样自然。
至于容错性,在整个研究过程中,部署的650个模块中有29个因电池耗尽或硬件故障失效(约4%)。系统的应对方式简单而有效:这些失效的模块要么被仍在运动的链条拖着走,要么就被留在原地,其他模块绕开它继续前进。由于集群不依赖任何特定成员,整体功能几乎不受影响。
这些现象恰好符合团队对“活性凝胶”类机器人物质的最初设想:一种在宏观上保持连贯性、在微观上又不断重组和再连接的连续介质。
意义与边界
在集群机器人领域,这项研究属于一个相对小众但日益受到关注的方向:将“如何控制集群”的问题,部分转化为“如何设计能让有益行为自然涌现的物理结构”。在以大模型、强化学习驱动机器人决策为主流的当下,这是一条逻辑路径有些“离经叛道”、但并非互斥的探索之路。
卡斯丁强调,他们“主要将这套系统视为研究机械智能如何带来集群稳健行为的工具”,它并非一套立即可用的产品或平台。当前的实验仍处于数十个模块、平面或近平面场景的阶段。要走向真实环境部署,规模化、三维缠绕能力、能源密度以及在更复杂地形中的可控性,都仍是亟待解决的开放性问题。
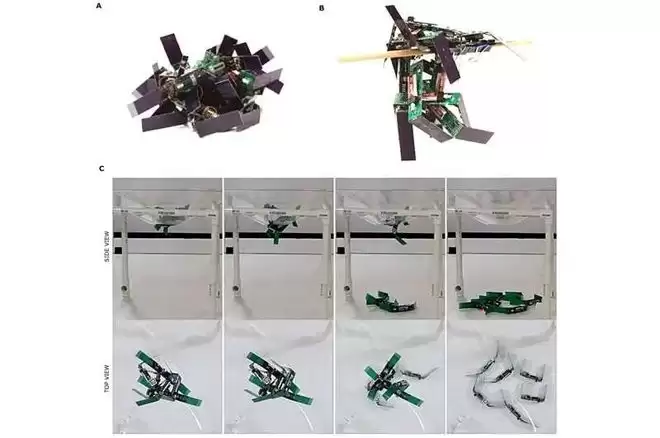
(来源:DOI: 10.1126/scirobotics.aec6393)
而且,用放弃精确控制来换取涌现性能的逻辑本身,也意味着这套范式并非适用于所有任务。那些需要确定路径、严格时序的工作,例如外科手术或精密装配线,显然不属于它的目标场景。然而,在一些需要在不可预测环境中长时间保持“基本可用”的领域——比如灾难搜救、环境监测或行星表面探索——这种将智能“埋入”物理结构本身的思路,或许能提供比“造出一个更聪明、试图预知一切可能情况的中央大脑”更为现实和稳健的解决方案。
这项研究最引人深思之处在于,它成功地将一个源自物理学和生物学的深刻洞见,转移到了工程实践层面。无论是蚁群还是活性凝胶,它们的形状、接触方式以及动态的键合关系,其本身就可以承载一种“智能”。
当机器人开始模仿这种“无脑的智慧”时,我们或许需要重新审视一个长期被视为理所当然的等式:智能,是否就等于计算?
参考内容:
https://www.science.org/doi/epdf/10.1126/scirobotics.aec6393
https://news.cornell.edu/stories/2026/05/robotic-matter-flows-adapts-through-mechanical-intelligence
https://arxiv.org/pdf/2411.16208
注:封面/首图由 AI 辅助生成

游乐网为非赢利性网站,所展示的游戏/软件/文章内容均来自于互联网或第三方用户上传分享,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系youleyoucom@outlook.com。
 同类文章
同类文章

前阿里技术大牛领衔字节自研智驾浮出水面华大地魔遇最强对手
终于,字节跳动还是踏出了这一步。 据36kr报道,字节正步步为营进军自动驾驶领域,具体事项由Seed的世界模型团队负责,该团队由前阿里通义大模型技术负责人周畅领导。 现阶段,高阶智驾已成中高端车型必备功能,并且不断下沉市场,部分10万元以内的产品已经用上了L2+级高阶辅助驾驶,还有少量车型配备了激光

砺算LX 7G100零售版显卡于7月17日京东首发上市 支持8K6
砺算科技官方宣布,旗下消费级显卡砺算 LX 7G100 零售版将于2026年7月17日在京东自营旗舰店正式开售。此前推出的创始版已全部售罄,本次零售版将作为后续供应,面向所有用户开放购买。 这款显卡基于砺算自主研发的TrueGPU架构,集成了多项硬核显示技术:支持NRSS超分辨率技术、10bit色深

亚马逊云科技开源MCP服务器 数秒免费检索全球科研数据
7月15日,在日内瓦联合国国际电信联盟举办的“人工智能向善”全球峰会上,亚马逊云科技推出了一款全新工具——开源模型上下文协议(MCP)服务器。简单来说,科学家和研究人员现在可以直接与AI对话,几秒钟内就能从亚马逊云科技开放数据注册表(RODA)中检索到所需的数据集。这一工具整合了全球最大的免费公开科

三星T9运动相机内存卡推荐户外影像存储一步到位
对于运动相机内存卡推荐,许多用户最担心的就是低速卡导致录制中断,或者容量太小装不下大量素材。市面上可选产品众多,但真正能够兼顾高速稳定、大容量和多设备兼容的专业存储卡并不多见。今天我们将重点聚焦三星T9 microSD存储卡,深入解析其核心优势——看完这篇,你无需再反复对比其他品牌,它几乎能覆盖所有

靠谱大容量TF卡推荐三星T7满足多设备扩容需求
说实话,现在手里的数码设备越来越多——平板、Switch、航拍无人机、运动相机……哪个不是存储空间的大户?偏偏很多设备出厂给的容量就那么一点点,扩容几乎成了刚需。这时候,一张靠谱的microSD TF卡就是最直接的解决方案。但低价杂牌卡的坑,相信不少人已经踩过。想要稳定性、大容量还兼顾通用性,三星原








- 热门数据榜



 相关攻略
相关攻略
 2026-07-16 22:42
2026-07-16 22:41
2026-07-16 22:40
2026-07-16 22:39
2026-07-16 22:39
2026-07-16 22:38
2026-07-16 22:38
2026-07-16 22:38
热门教程
2026-07-16 22:42
2026-07-16 22:41
2026-07-16 22:40
2026-07-16 22:39
2026-07-16 22:39
2026-07-16 22:38
2026-07-16 22:38
2026-07-16 22:38
热门教程
- 游戏攻略
- 安卓教程
- 苹果教程
- 电脑教程
















