




蚂蚁灵波LingBot-VA论文入选RSS 2026 实现机器人推演与行动同步

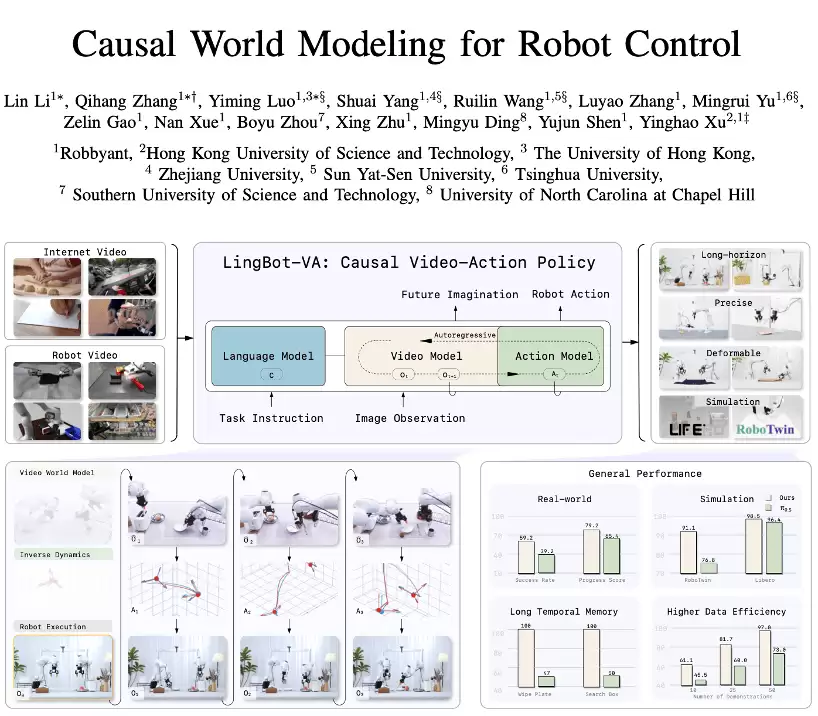
蚂蚁灵波科技与港科大合作的研究被RSS2026接收,提出面向机器人控制的因果世界建模框架,并推出开源自回归视频-动作世界模型LingBot-VA。该模型使机器人能持续预测环境变化并生成动作,实现“边观察、边判断、边行动”的类人能力,在仿真与真实任务中表现出优异的数据效率和泛化能力。
近日,机器人学界迎来一项重要进展:蚂蚁灵波科技联合香港科技大学等高校共同完成的研究论文《Causal World Modeling for Robot Control》,正式被国际机器人顶级学术会议Robotics: Science and Systems(RSS)2026接收。
RSS在全球机器人研究领域享有极高声誉,长期聚焦于机器人学习、控制与感知等前沿方向,其录用标准极为严格。此次论文成功入选,不仅彰显了研究工作的学术创新性,也标志着该成果获得了国际同行的高度认可。
这项研究致力于解决一个核心挑战:如何让机器人超越简单的动作执行,具备类似人类的预判能力,在行动前就能推断环境变化。为此,研究团队提出了一个面向机器人控制的因果世界建模框架,并在此基础上构建了全球首个开源的自回归视频-动作世界模型——LingBot-VA。该模型的突破性在于,它使机器人能够在任务执行过程中,持续预测环境状态的演变,并基于预测结果生成后续动作指令,从而实现“观察-判断-行动”一体化的类人智能。
对蚂蚁灵波而言,此次论文入选RSS 2026,是对其在“世界模型驱动机器人控制”这一技术路线上探索的重要肯定。它进一步验证了LingBot-VA作为具身智能基础模型的技术潜力。从长远看,这一技术路径有望推动机器人从依赖精确编程的“执行器”,向具备环境理解、任务泛化与自主决策能力的“智能体”演进。
机器人技术面临的真正难点,往往不在于“如何动作”,而在于理解“动作引发的后果”。例如,拿起杯子后桌面会空出位置,推开抽屉后内部物品的布局会改变。LingBot-VA的核心创新,正是将这种对未来状态的因果预测能力嵌入了控制闭环。它让机器人学会先“模拟推演”世界接下来会如何变化,再依据这个推演结果来决定当前的最佳行动策略。
这也正是论文强调“因果”建模的意义所在。真实世界的变化遵循严格的时间顺序与因果关系,因此机器人的预测也必须沿着时间线逐步向前推演。LingBot-VA将这种因果约束固化在模型架构中,确保每一步预测都严格依赖于先前的观察与动作,从而生成连贯、可靠的因果轨迹。这种设计不仅提升了预测的准确性,也赋予了模型更强的长期记忆与推理能力,对于完成步骤复杂、耗时较长的实际任务至关重要。
在技术实现上,LingBot-VA采用了混合专家Transformer架构,巧妙地将视频预测与动作生成统一在一个自回归扩散框架内。此外,模型引入了闭环推演机制,能够在任务执行中持续接收真实环境的反馈,从而有效降低长时序预测中的误差累积。
为全面评估LingBot-VA的性能,研究团队在仿真基准与真实机器人任务上进行了系统测试。在RoboTwin 2.0的50个双臂操作任务中,LingBot-VA在Easy和Hard两种设置下,分别取得了92.0%和91.1%的平均成功率;在LIBERO基准上的成功率更是达到98.5%。
在更具挑战的真实世界评测中,面对长时序、高精度操作以及柔性物体与关节物体操控三大类共6项高难度任务,LingBot-VA仅需50条真实示范数据即可完成适配。其整体成功率较业界主流基线方法π0.5提升了超过20个百分点,展现出卓越的数据效率与泛化性能。
目前,LingBot-VA的模型权重、训练与推理代码均已开源。研究人员与开发者可通过Model Scope、Hugging Face及GitHub平台获取相关资源。
论文链接:https://arxiv.org/abs/2601.21998
项目主页:https://technology.robbyant.com/lingbot-va
你是一名 AI 行业编辑,请围绕下面这条热点输出一份资讯解读:
热点:蚂蚁灵波LingBot-VA论文入选RSS 2026 实现机器人推演与行动同步要求:
1. 先用一句话解释这条热点在讲什么
2. 再总结它为什么重要
3. 说明会影响哪些 AI 产品或内容方向
4. 最后给出 3 个适合资讯站使用的标题
游乐网为非赢利性网站,所展示的游戏/软件/文章内容均来自于互联网或第三方用户上传分享,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系youleyoucom@outlook.com。
 相关热点
相关热点QuickieAI是一款轻量级Chrome插件,核心逻辑是快速准确。在写作、社交媒体运营、营销活动场景中,一键完成内容研究与文案生成,支持侧边栏即时响应。可辅助写作、生成多平台文案及营销话术,擅长冷启动,最终质量需人工微调。
快手开源图像生成模型可图Kolors,采用GLM文本编码器支持中英文双语理解,可处理256token长文本。基于数十亿文本图像对训练,专门优化中国文化元素,能稳定生成中文文字,英文文字偶有缺漏。
Hebbia是一款专为金融、法律、政府和制药等行业设计的AI搜索引擎,其Matrix产品通过拆解复杂文档实现自动化信息提取与分析,已获3000万美元融资。它适用于研究人员、商业人士及学生,提供全面、精准的检索与洞察。
Penf1是一款AI驱动的博客创作工具,专注于简化从构思到发布的全流程。它支持即时内容生成、创意破题和SEO优化,帮助创作者快速获得高质量初稿,从而将精力集中于打磨观点和注入个人风格。
- 日榜
- 周榜
- 月榜
热点快看