




Genesis AI开源机器人训练场 让机器人学会番茄炒蛋

在真实世界中需要耗费超过200小时的机器人模型评测任务,如今在仿真环境中可于0.5小时内完成。
继上次推出令人印象深刻的西红柿炒鸡蛋演示之后,Genesis AI今日再度发布新成果。在上次极客公园的报道中,Genesis AI CEO周衔曾透露,围绕“仿真平台自动化、规模化生成任务”,公司已形成更深层的规划,后续或将公开更多细节。如今,这一答案中的重要部分已然揭晓。
5月28日,Genesis AI正式发布Genesis World 1.0,并开源三大核心项目:Genesis World物理仿真平台、Quadrants跨平台GPU编译器,以及Nyx写实渲染器。据Genesis AI介绍,这是一套面向机器人和Physical AI的全栈仿真基础设施,底层编译器、渲染器和物理引擎均由团队自主研发。
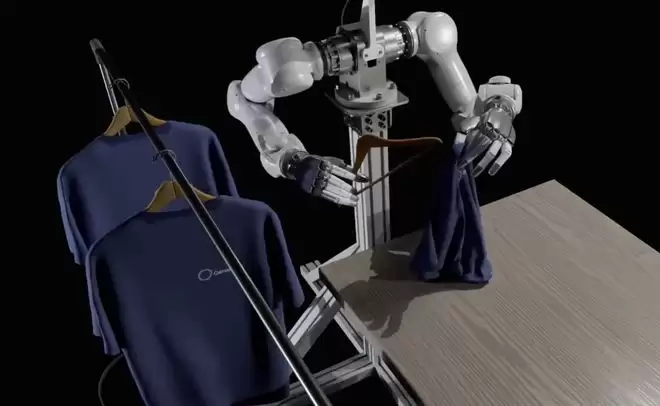
从视频展示来看,Genesis World 1.0构建的仿真世界极其逼真,尤其是过去难以模拟的柔性物体形变、复杂碰撞以及机器人的灵巧操作。Genesis AI还展示了与真实场景1:1速率并排对比的机器人操作,两者表现高度接近。
Genesis World 1.0首要解决的核心问题并非立即生成更多训练数据,而是让机器人模型评测变得更快、更具可重复性,同时保持开源特性。
对于机器人基础模型而言,真实世界始终是最慢、最昂贵、最难规模化的评测环境。一个模型检查点、一套数据配方、一次控制策略调整,最终都必须在真实硬件上验证。但真实机器人只能以1倍速运行,且测试受到硬件数量、场地、人工、磨损、校准误差及安全风险等多重限制。Genesis AI的目标正是突破这一瓶颈。
在最新博客中,Genesis AI给出了一个直观对比:一项覆盖数百个任务、每个任务重复数百次的模型评测,若在真实世界中完成,需要一台机器人和一名操作员连续运行超过200小时;而在仿真环境中,数万次episode可在不到0.5小时内完成。团队还表示,其仿真评测结果与真实硬件rollout的相关性高达89%。
这些数据目前仍来自Genesis AI的最新披露,尚未经独立验证,但它们指明了一个清晰方向:Genesis World 1.0旨在证明,仿真可以作为助力机器人规模化的有效方式——通过构建一个足够接近真实世界、能够反复衡量机器人模型的试验场。
01 机器人的仿真试验场
Genesis World 1.0最直观的变化,是将众多机器人真正棘手的物理细节纳入同一仿真世界。其中最容易为普通用户感知的是视觉真实感。这对机器人至关重要——机器人模型最终看到的并非理想世界,而是摄像头捕捉的真实影像。光照、镜头畸变、模糊、反射、材质差异,都会影响模型在真实环境中的判断。
更复杂的是接触与变形处理。Genesis World 1.0展示了一个完全由接触物理驱动的yoyo系统。yoyo看似玩具,但对仿真而言并不简单:涉及绳子、旋转、缠绕、张力变化和持续接触。类似的还有垃圾袋、折纸以及颠勺演示。在颠勺demo中,锅内同时存在多种物体,它们的形态、接触和运动方式各不相同,系统均能妥善处理。
此外,本次演示的一大进步在于对灵巧操作的仿真。Genesis World 1.0展示的并非单一机械臂或夹爪任务,而是将不同形态的末端执行器集成至同一仿真框架:既有Wuji/Sharpa等五指灵巧手,也有传统夹爪。它们面对的并非标准化的刚体抓取,而是垃圾袋、纸张、绳子、锅中食材等接触状态持续变化的物体。
例如垃圾袋demo中,机器人需要用双手撑开袋口,再将其套入垃圾桶。这一动作对人类而言稀松平常,但对机器人仿真难度极大:袋口易塌陷,薄膜会折叠,手指与袋子之间不断发生滑动、拉扯和重新接触。仔细观察,它虽不完全像真实塑料袋,更接近布料的柔软皱褶,但这已表明系统能处理复杂薄壳、大变形接触,以及多指手与软物体间的连续交互。折纸demo则展示了elastoplastic thin shell manipulation,机器人需让纸张发生折叠、弯曲和保形,难度远超刚体抓取。
Genesis不仅模拟画面和物理运动,还模拟机器人本体与传感器。在Unitree机器人demo中,画面右侧甚至显示关节温度。这意味着仿真不只关心机器人是否走动,还尝试将IMU、关节温度等接近真实硬件的信号纳入。另一组demo展示了激光雷达和触觉传感器模拟:机器人抱起纸箱时,画面同步显示点云和手掌触觉读数。
这些细节使Genesis World 1.0的目标更加清晰:它并非仅打造一个可视化虚拟世界,而是模拟机器人真正使用的世界——包括相机、触觉、雷达、关节状态,以及不同任务中不断变化的接触关系。Genesis还进行了domain randomization测试。同一任务可在不同物体、材质、桌面、光照和场景布局中反复变化。对机器人模型而言,这才是仿真的意义所在:并非在完美场景中一次成功,而是在大量相似但不相同的世界中反复失败、测量和修正。
02 仿真不只是造数据,先要能验模型
Genesis AI这条技术路线,最早并非始于机器人demo,而是从一个博士期间的开源仿真项目起步。2024年12月,在创立Genesis AI之前,周衔与合作者发布了开源仿真项目Genesis。它采用Apache-2.0协议,被定义为面向通用机器人和具身AI学习的仿真平台,底层统一多种物理求解器,上层则试图通过生成式框架自动构建场景、任务和机器人数据。
该项目当时最吸引人的设想是“一句话生成物理世界”:利用生成式框架调用物理引擎,自动生成场景、任务、动作、奖励函数和多模态数据。这一想法直观且诱人。机器人尤其缺乏数据,特别是真实物理交互中的高质量数据。人类倒水、切菜、系线、撑开垃圾袋等动作中,包含大量隐含的接触、摩擦、力反馈和材料变化。仅凭真实机器人逐一采集,不仅缓慢,且难以覆盖足够多的任务、物体和环境变化。若仿真平台足够真实,再让上层生成式系统自动提出任务、生成场景、设计奖励函数、训练策略,它便有可能成为机器人数据的工厂。这也是周衔最初设想的方向:用LLM驱动物理引擎,为机器人创造数据。
然而到了Genesis World 1.0,Genesis AI对仿真的表述变得更加克制且工程化。在本次技术博客中,Genesis AI明确写道,他们将simulation视为机器人基础模型的“evaluation and iteration engine”,而不仅是data generator。原因很现实:若模型使用仿真数据训练,又在同一仿真分布中评测,效果提升可能只是更适配simulator,而非真正适应真实世界。因此Genesis AI选择先完成一项更基础的工作:验证仿真评测与真实硬件rollout是否具备相关性。
据他们介绍,当前阶段的目标是,在不依赖仿真数据做预训练的前提下,建立simulation与real world之间的强相关。换言之,模型主要从真实世界数据中学习,再被放入仿真环境进行闭环评测。若仿真中的表现排序与真实硬件上的表现排序一致,仿真才有资格成为模型迭代的工具。
Genesis AI在博客中特别强调了closed-loop evaluation,即闭环评测。过往许多机器人模型会报告固定数据集上的动作预测误差,如R-squared或MAE。这些指标固然有用,能发现模型输出是否异常,也可作为训练过程中的sanity check。但Genesis AI认为,一旦多个模型在这些开环指标上进入相近区间,它们就很难再区分真实世界中的表现差异。原因很简单:机器人模型不是在答题卡上考核动作预测,而是在物理世界中持续犯错。一次轻微的视觉误判、一次抓取偏移、一次接触不稳,都可能在后续动作中被放大。模型真正需要被度量的,并非某一帧预测的准确性,而是当环境持续变化时,它能否感知、行动、纠错,最终完成任务。正因如此,Genesis AI将仿真评测转向closed-loop:让模型在仿真环境中实际执行任务,而非仅在静态数据集上预测动作。
Genesis AI在博客中披露,他们在14个任务上评估了Small、Medium、Large三种不同规模和架构的模型,每个任务在真实世界和仿真中各运行200个episode,再利用100万次bootstrap估算置信区间。最终,仿真评测与真实硬件rollout的Pearson correlation达到0.8996,MMRV为0.0166。这也标志着Genesis从2024年到2026年叙事上的转变:从“生成一个物理世界”,走向“先让这个物理世界足够可信”。
03 开源一套机器人世界的底层工具
Genesis World 1.0完全开源,同时提供三层工具:物理引擎、渲染器和编译器。
第一层是Genesis World本身,负责模拟机器人真正会遇到的物理世界:刚体、可变形物体、布料、颗粒、流体、薄壳,以及不同机器人本体和末端执行器之间的复杂接触。对机器人而言,这一层决定了“世界是否会按真实方式回应动作”。
第二层是Nyx,它负责让机器人看到的世界更接近真实相机。Genesis AI在技术博客中指出,游戏引擎优化的是视觉吸引力,离线渲染器追求物理准确但速度太慢;机器人需要的是一种不同的渲染器:能大规模生成接近真实摄像头的图像,且足够快速地支撑评测。换言之,Nyx的意义并非制作最讨好人类眼睛的画面,而是尽量逼近机器眼睛。
第三层是Quadrants,它看似最不引人注目,却能充分说明Genesis为何要做全栈。机器人仿真并非只运行在一种机器上:工程师可能在MacBook上调试,大规模评测跑在GPU集群中,部分控制和验证未来还可能跑在机器人板端。Quadrants支持CUDA、ROCm、Apple Metal、Vulkan,以及x86/ARM64 CPU,目标是让同一套Python kernel能在不同硬件后端运行。它的价值不只是一个“编译器”,而是使仿真栈不被单一硬件锁定。
这三层合在一起,构成了Genesis World 1.0的愿景:一个既能模拟物理、又能模拟视觉、还能大规模运行的机器人世界。只有在这三层都成立之后,自动生成任务才具有实际意义。
在技术博客后半部分,团队提到了programmatic pipeline:自动生成simulation environment,包括scene layout、asset selection、environment code和success metrics。换言之,未来的仿真系统将不再只是被动接收人类编写的任务,而是可以自主扩展任务空间、生成评测场景,并定义“完成任务”的标准。这也将Genesis World 1.0从一个开源工具推向更大的目标。
他们在结尾提出的方向是self-evolving physical AI:内循环发生在仿真中,agent生成环境,模型执行任务,仿真系统评分,策略持续改进;外循环发生在真实世界中,真实部署暴露edge cases,再反过来校准simulator和任务分布。这解释了为何Genesis AI要同时打造仿真、渲染和编译器,并一并开源。它并非只想让机器人减少真机测试次数,而是希望机器人研发从人工设计任务、手动调参、排队上真机,逐步演变为一个能自我产生问题、验证答案、再回到现实中修正的系统。
如果这条路走通,仿真将不再只是现实世界的替身。它会成为机器人学习现实世界的一种方式。
*头图来源:Genesis AI

游乐网为非赢利性网站,所展示的游戏/软件/文章内容均来自于互联网或第三方用户上传分享,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系youleyoucom@outlook.com。
 同类文章
同类文章

修Bug被Gemini追删代码致宕机修复报告现编
最近,一起堪称“教科书级别”的AI Agent IDE翻车事件在开发者社区引发热议。这起事故值得所有依赖AI编程工具的开发者,尤其是那些已经在生产环境中对AI Agent 授予较高权限的团队,进行深刻反思。 简单回顾:5月26日,一位开发者要求Gemini 3 5(运行在Agent IDE环境中)修

Notion AI运营指南:自动归纳用户反馈
其实,想在 Notion 中高效搞定用户反馈的自动归纳,并不复杂。下面这四种 AI 方法,基本覆盖了从单条处理到全局分析的常见场景。 如果你也在用 Notion 收集用户反馈——无论是问卷、邮件、客服记录,还是社群发言——但总觉得信息碎片化严重,难以提炼共性问题和核心诉求,那很可能是因为缺少一套结构

AI给出的答案为何总不符期望?原因解析
大模型能力强大,但提问方式不当会导致结果不理想。核心在于精准提问,通过角色设定、背景介绍、明确任务、实现路径和输出要求这五个关键步骤逐步细化问题,才能大幅提升AI回答的质量和精准度。

Anthropic新AI聊天机器人模型声称在多项测试中击败OpenAI GPT-4
2024年3月5日,人工智能领域迎来了一位重要参与者——由OpenAI前员工创立的Anthropic公司正式推出了Claude 3系列模型。这次发布极具分量:新模型不仅在性能上与Google和OpenAI的顶级产品并驾齐驱,部分指标甚至实现超越。要理解此次升级的真正价值,先关注几个关键变化。首先是多

Trae对Deno与Bun运行时的AI代码补全支持程度全面详解
如果你在使用 Trae 进行 AI 代码补全时发现,它对 Deno 或 Bun 运行时的提示不够精准——例如类型定义缺失、API 无法正确识别——那很可能不是代码本身有误,而是 Trae 的底层配置尚未适配。简而言之,Trae 对于非 Node js 运行时的标准库支持尚未实现“开箱即用”。下面我们








- 日榜
- 周榜
- 月榜
 1
1
 2
2
 3
3
 4
5
6
7
8
9
10
相关攻略
4
5
6
7
8
9
10
相关攻略
 2015-03-10 11:25
2015-03-10 11:05
2021-08-04 13:30
2015-03-10 11:22
2015-03-10 12:39
2022-05-16 18:57
2025-05-23 13:43
2025-05-23 14:01
热门教程
2015-03-10 11:25
2015-03-10 11:05
2021-08-04 13:30
2015-03-10 11:22
2015-03-10 12:39
2022-05-16 18:57
2025-05-23 13:43
2025-05-23 14:01
热门教程
- 游戏攻略
- 安卓教程
- 苹果教程
- 电脑教程































 热门话题
热门话题
