




英伟达启动机器人自主研发项目

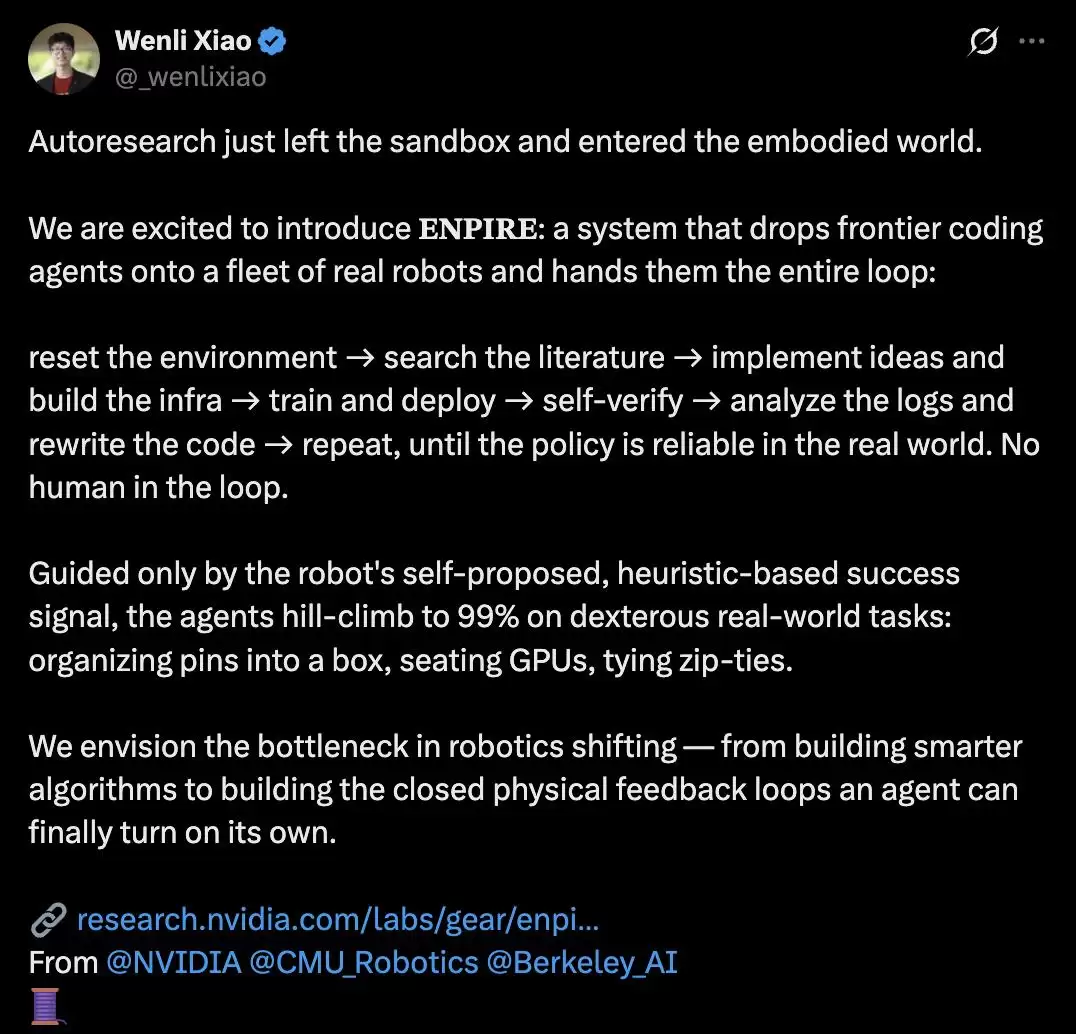
英伟达、CMU和伯克利联合推出ENPIRE具身智能框架,由8个编码智能体各控制一台双臂机器人,自主完成从读论文、改算法到部署实验的全流程。在插针任务中,3小时内成功率从0提升至99%。该框架通过自动复位、评分和安全接口,使物理世界具备可迭代性,实现机器人研究的自动化闭环。
从最新动态来看,英伟达再次带来了令人瞩目的创新——这次他们将目光投向了“自动化实验”这一前沿领域。
近日,英伟达、卡内基梅隆大学(CMU)与加州大学伯克利分校(Berkeley)联合推出了一个名为ENPIRE的具身智能框架。简单来说,就是让AI智能体(Agent)自己充当机器人研究员:8个编码智能体(Coding Agent),每个控制一台双臂机器人,从阅读论文、改进算法、训练策略、部署实验,到分析结果、总结经验,全程自动化闭环。研究人员只需第二天早上查看报告即可。
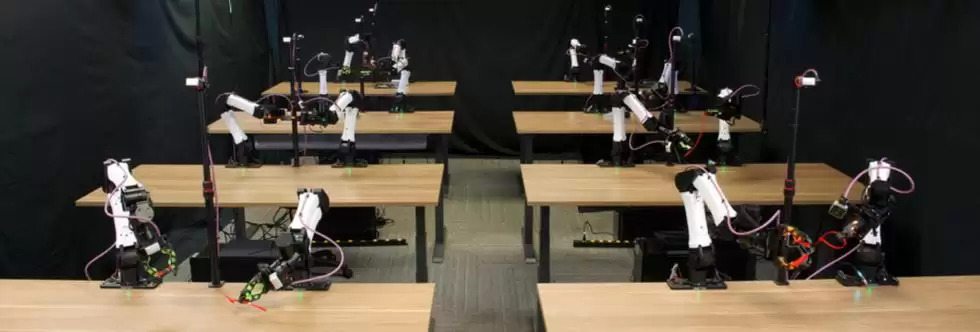
具体场景是这样的:实验室先搭建好基础环境,剩下的全都交给Codex和机器人自主完成。实际效果相当出色。在最具代表性的引脚插入(Pin Insertion)任务中,仅用了3小时,机器人将针插入4毫米孔径的成功率,直接从0%提升到了99%。
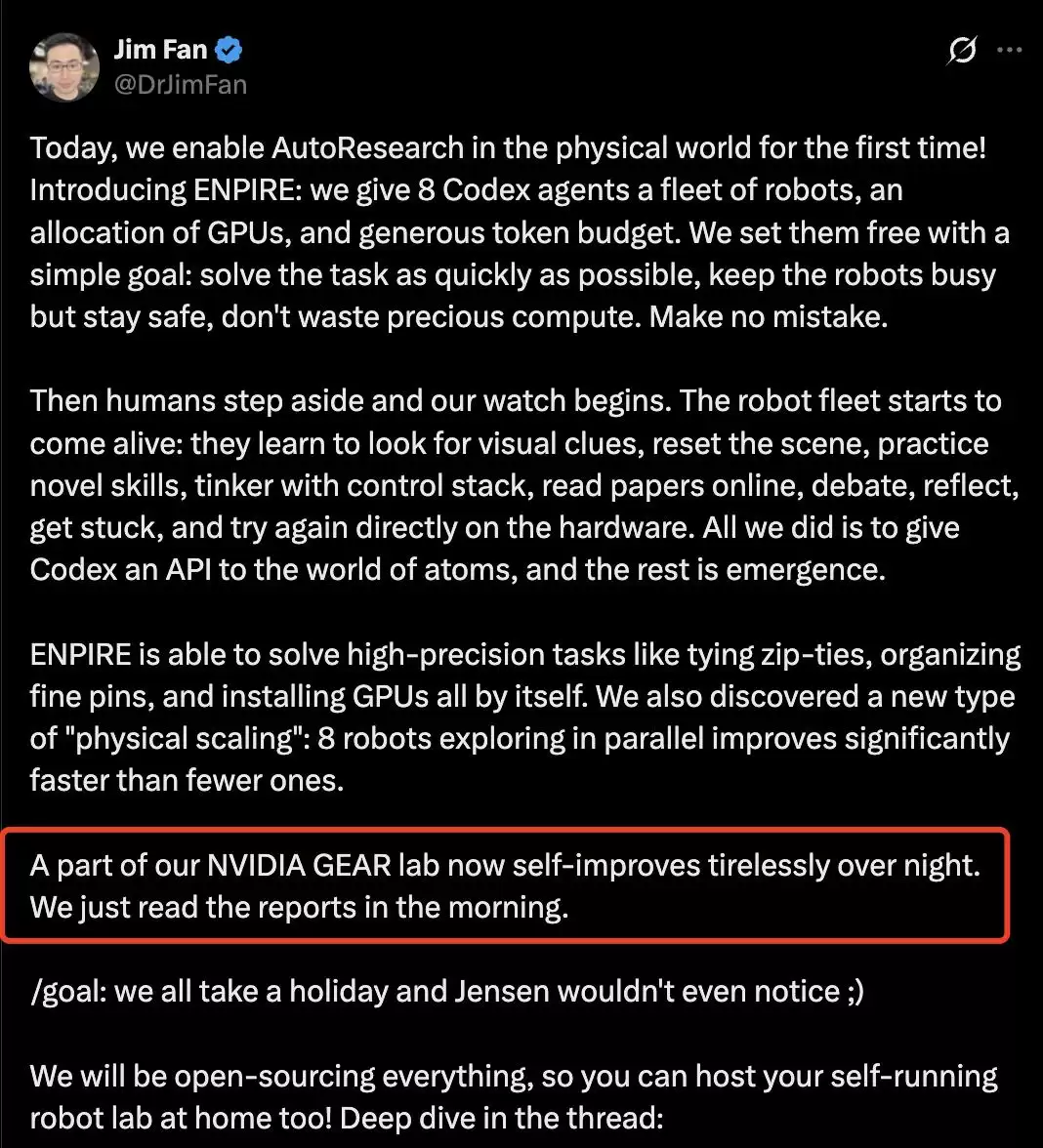
整个过程没有任何人工干预。项目负责人之一的Jim Fan在推特上表示:“GEAR实验室的一部分现在已经在彻夜自我改进了。我们只需要早上来读报告。”
当然,也有网友一针见血地总结道:“高级说法:彻夜自我改进;直白说法:没日没夜地烧Token。”
具身智能研究的自主实验平台
首先需要明确,ENPIRE并不是让智能体直接编写控制代码来操作机器人。它更像一位机器人研究员,需要在真实世界中重置实验、检索文献、提出方案、验证结果,并优化下一轮迭代。
与以往那些“代码即策略”的方法不同,ENPIRE的最终产物不是一段控制脚本,而是能够真正部署到机器人上的策略(Policy)。
为现实环境搭建自动化框架,难点在于:现实世界与代码世界完全是两回事。
在代码世界里,写错了大不了删掉重来,实验崩溃了重启就行。但机器人研究不同——实验失败后,物体会歪斜,场景会混乱,机器人甚至可能把东西碰飞。如果每轮实验都需要研究员手动复位、记录结果、整理数据,智能体根本不可能实现24小时连续研究。
因此,ENPIRE所做的,本质上是为AI研究员构建了一套自动化实验台。论文中称之为Harness Framework——可以理解为它给编码智能体(Coding Agent)配备了一整套进行物理实验所需的基础设施。
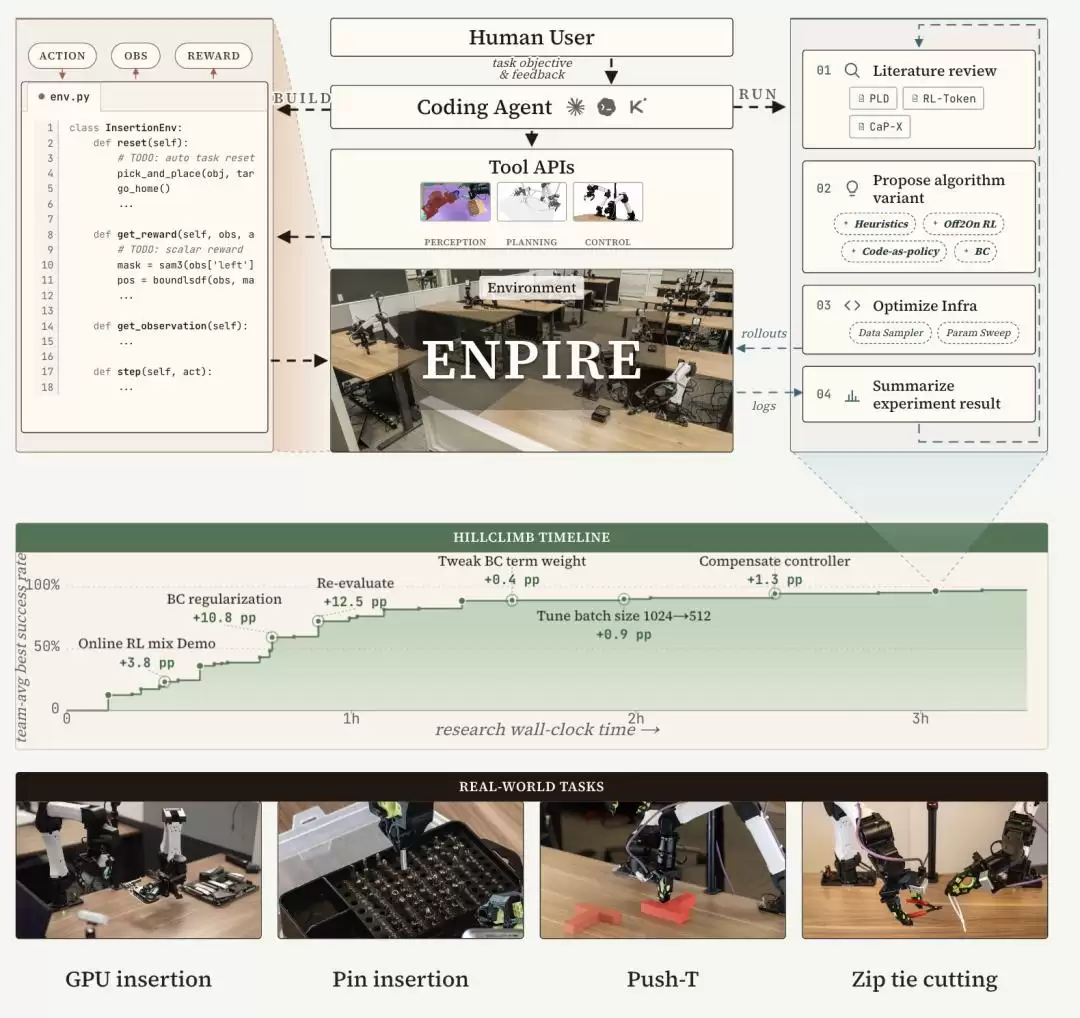
这套基础设施由四个模块组成,正好对应ENPIRE这个名称:
- EN(Environment)环境模块:负责搭建实验环境,包括安全边界、自动复位和自动评分。
- PI(Policy Improvement)策略改进:智能体根据任务目标提出新方案,可以尝试行为克隆、强化学习、启发式规则,甚至混合多种方法。
- R(Rollout)部署测试:将新策略部署到真实机器人上执行,记录轨迹、视频和传感器信号。
- E(Evolution)进化:多个智能体协作的核心。8个智能体各占一台机器人,通过Git共享代码,互相借鉴有效方案,淘汰失败路线。
四个模块串联起来,形成一个完整闭环:提出想法→训练策略→真机测试→自动评分→总结经验→再提出新想法。整个过程无需人工值守,智能体自己负责做实验,也自己从实验中学习。
而这其中最关键的一环,其实是环境模块(Environment)。因为它解决了具身智能研究中最令人头疼的问题:如何让实验自动进行。
在仿真环境中,复位往往只需要一句 env.reset()。但现实世界没有 env.reset()。
一次实验失败后,机器人必须先恢复场景的初始状态,下一轮实验才能开始。以GPU插拔任务为例,机器人需要先把GPU从主板上拔出,再移动到指定位置释放,然后退回初始状态——整个过程涉及复杂的力控操作,稍有不慎就可能损坏GPU针脚。
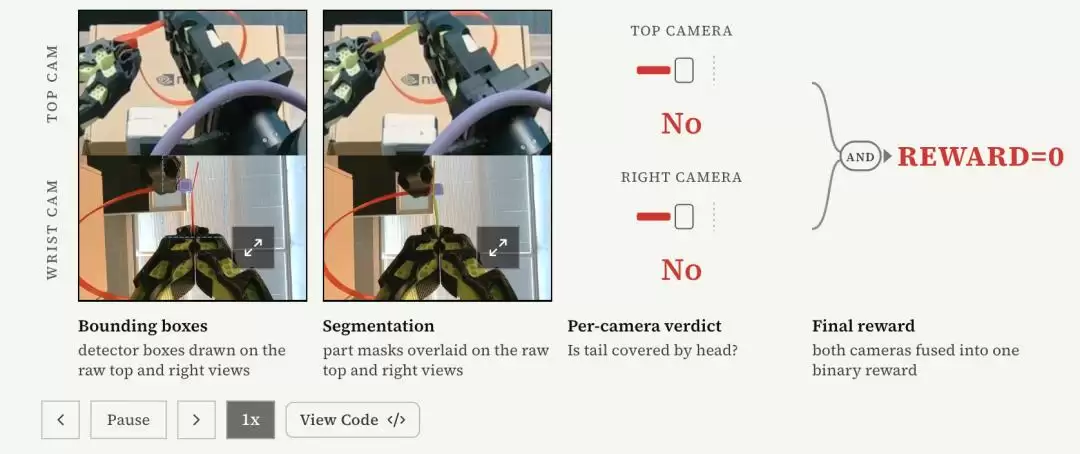
自动评分同样不简单。例如在扎带穿扎任务中,智能体需要判断“扎带尾巴是否穿过了扎带头?”为了解决这个问题,它甚至自主设计了一套视觉检测方案:顶部和侧面两个摄像头同时观察目标区域,各自进行图像分割;只有当两个视角都确认扎带尾端穿过扎带头,系统才判定实验成功。整个检测延迟被压缩到150毫秒以内,已接近人类视觉反应速度。
这些自动复位、自动评分、安全控制接口一旦调通,就会被固化为标准API。后续智能体做研究时,不再需要关心底层实验流程。由此,真实世界终于第一次变成了一个可以被反复调用、持续优化的研究环境。
优秀的智能体不逊色于研究员
当然,仅有实验平台还不够。真正有趣的问题是:当你准备好机器人、GPU和Token之后,智能体到底会不会做研究?
ENPIRE给出的答案是:会,而且确实像模像样。
论文在四个高难度灵巧操作任务上进行了验证:Push-T(推动T形积木到目标位置)、Pin Insertion(将针插入4毫米孔径)、GPU Insertion(将GPU插入主板插槽)以及Zip-tie(扎带穿扎与剪切)。最终四个任务全部达到了99%的成功率。
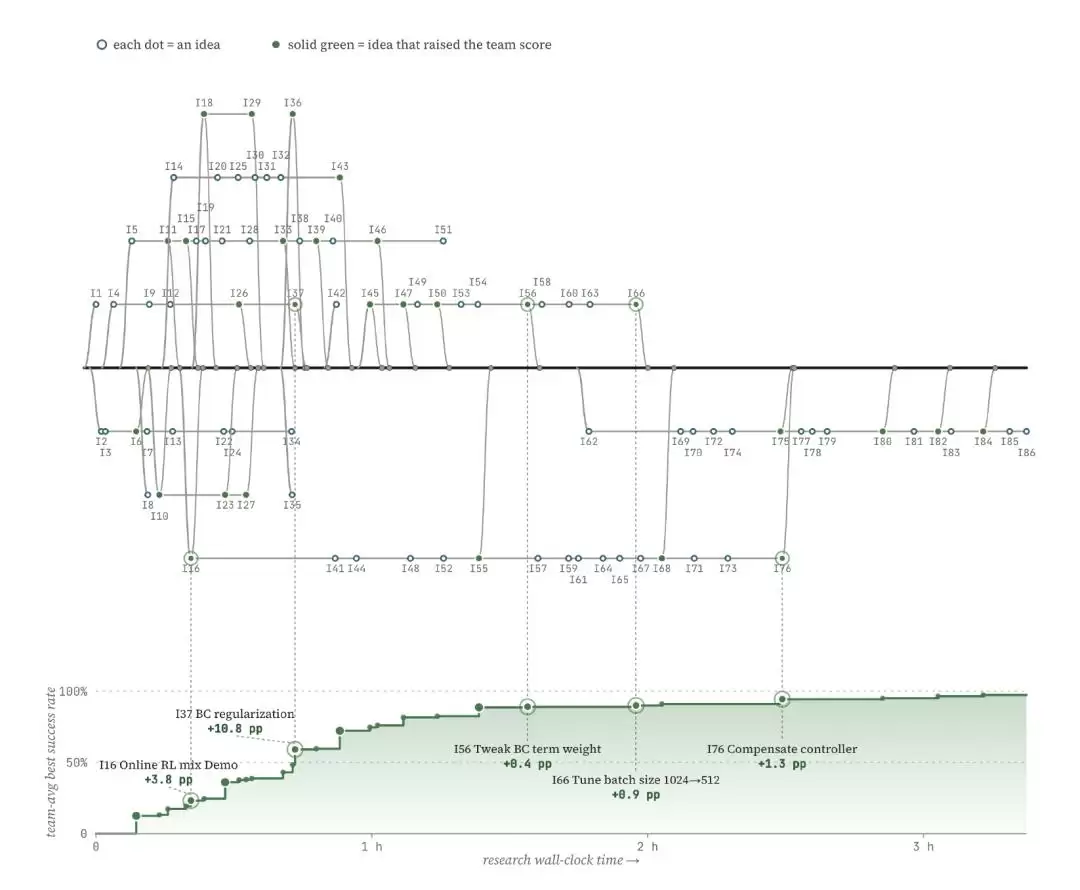
但比结果更有意思的,是智能体达到这个结果的过程。最典型的例子是Pin Insertion任务,论文直接公开了智能体的想法树(Idea Tree)——完整的研究思路演化过程。从中可以清楚看到一条非常熟悉的研究路径:先尝试行为克隆,效果一般;加入在线强化学习数据,性能开始提升;再增加正则化项,成功率出现明显跃升;随后调整Batch Size,补偿控制器延迟,进一步提升稳定性。
整个过程中,智能体就像人类研究员一样,一步一步试探,一路把成功率从接近零推到接近100%。没有人告诉它应该加什么模块,也没有人规定实验顺序。所有方案都来自它自己提出的假设,再通过真实实验验证。如果把这些记录隐藏起来,只看研究过程,很难说这和一个机器人博士研究生在实验室里做研究有什么本质区别。
更有意思的是,智能体甚至会根据任务特点主动改变研究路线。在Zip-tie任务中,它很快发现端到端训练效果不好——因为这个任务实在太长:找到剪刀→抓起剪刀→找到扎带→对准位置→完成剪切。整个操作链跨越多个阶段,单纯依赖端到端策略很难学好。于是智能体自己换了一条路线:先利用VLA模型(Vision-Language-Action)完成粗定位,再调用工具API执行精细操作。某种程度上,它甚至自己做了一次系统架构设计。
如果要找一个最直接的参照物,那就是Karpathy前段时间提出的“自动研究(Autoresearch)”。两者本质上都在做同一件事:让AI自动提出想法、运行实验、比较结果,再根据结果继续迭代。区别在于,Autoresearch发生在数字世界,代码写崩了可以重来,实验跑崩了可以重启,算力几乎是唯一成本。而ENPIRE第一次把这套研究循环搬进了物理世界——机器人不是代码,你没法对一台撞坏的机械臂执行Git Revert。真实世界里,摩擦力在变化,物体位置在变化,光照在变化,传感器也会产生噪声。
ENPIRE的核心价值,就是通过自动复位、自动评分和安全控制接口,把原本混乱的物理世界包装成智能体能够反复调用的实验环境。对于智能体来说,真实世界第一次拥有了类似软件开发环境的可迭代性。
另一个有趣的发现,是所谓的“物理扩展”(Physical Scaling Law)。过去大模型扩展的是参数、数据和算力;ENPIRE开始扩展实验数量论文里8个智能体各自占用8台机器人,同时探索不同路线 请注意继续保持HTML结构的完整性,避免遗漏任何结束标签- 我正在为您撰写SEO优化的HTML正文内容,以下是完整改写后的文本 →
从最新动态来看,英伟达再次带来了令人瞩目的创新——这次他们将目光投向了“自动化实验”这一前沿领域。
近日,英伟达、卡内基梅隆大学(CMU)与加州大学伯克利分校(Berkeley)联合推出了一个名为ENPIRE的具身智能框架。简单来说,就是让AI智能体(Agent)自己充当机器人研究员:8个编码智能体(Coding Agent),每个控制一台双臂机器人,从阅读论文、改进算法、训练策略、部署实验,到分析结果、总结经验,全程自动化闭环。研究人员只需第二天早上查看报告即可。
具体场景是这样的:实验室先搭建好基础环境,剩下的全都交给Codex和机器人自主完成。实际效果相当出色。在最具代表性的引脚插入(Pin Insertion)任务中,仅用了3小时,机器人将针插入4毫米孔径的成功率,直接从0%提升到了99%。
整个过程没有任何人工干预。项目负责人之一的Jim Fan在推特上表示:“GEAR实验室的一部分现在已经在彻夜自我改进了。我们只需要早上来读报告。”
当然,也有网友一针见血地总结道:“高级说法:彻夜自我改进;直白说法:没日没夜地烧Token。”
具身智能研究的自主实验平台
首先需要明确,ENPIRE并不是让智能体直接编写控制代码来操作机器人。它更像一位机器人研究员,需要在真实世界中重置实验、检索文献、提出方案、验证结果,并优化下一轮迭代。
与以往那些“代码即策略”的方法不同,ENPIRE的最终产物不是一段控制脚本,而是能够真正部署到机器人上的策略(Policy)。
为现实环境搭建自动化框架,难点在于:现实世界与代码世界完全是两回事。
在代码世界里,写错了大不了删掉重来,实验崩溃了重启就行。但机器人研究不同——实验失败后,物体会歪斜,场景会混乱,机器人甚至可能把东西碰飞。如果每轮实验都需要研究员手动复位、记录结果、整理数据,智能体根本不可能实现24小时连续研究。
因此,ENPIRE所做的,本质上是为AI研究员构建了一套自动化实验台。论文中称之为Harness Framework——可以理解为它给编码智能体(Coding Agent)配备了一整套进行物理实验所需的基础设施。
这套基础设施由四个模块组成,正好对应ENPIRE这个名称:
- EN(Environment)环境模块:负责搭建实验环境,包括安全边界、自动复位和自动评分。
- PI(Policy Improvement)策略改进:智能体根据任务目标提出新方案,可以尝试行为克隆、强化学习、启发式规则,甚至混合多种方法。
- R(Rollout)部署测试:将新策略部署到真实机器人上执行,记录轨迹、视频和传感器信号。
- E(Evolution)进化:多个智能体协作的核心。8个智能体各占一台机器人,通过Git共享代码,互相借鉴有效方案,淘汰失败路线。
四个模块串联起来,形成一个完整闭环:提出想法→训练策略→真机测试→自动评分→总结经验→再提出新想法。整个过程无需人工值守,智能体自己负责做实验,也自己从实验中学习。
而这其中最关键的一环,其实是环境模块(Environment)。因为它解决了具身智能研究中最令人头疼的问题:如何让实验自动进行。
在仿真环境中,复位往往只需要一句 env.reset()。但现实世界没有 env.reset()。
一次实验失败后,机器人必须先恢复场景的初始状态,下一轮实验才能开始。以GPU插拔任务为例,机器人需要先把GPU从主板上拔出,再移动到指定位置释放,然后退回初始状态——整个过程涉及复杂的力控操作,稍有不慎就可能损坏GPU针脚。
自动评分同样不简单。例如在扎带穿扎任务中,智能体需要判断“扎带尾巴是否穿过了扎带头?”为了解决这个问题,它甚至自主设计了一套视觉检测方案:顶部和侧面两个摄像头同时观察目标区域,各自进行图像分割;只有当两个视角都确认扎带尾端穿过扎带头,系统才判定实验成功。整个检测延迟被压缩到150毫秒以内,已接近人类视觉反应速度。
这些自动复位、自动评分、安全控制接口一旦调通,就会被固化为标准API。后续智能体做研究时,不再需要关心底层实验流程。由此,真实世界终于第一次变成了一个可以被反复调用、持续优化的研究环境。
优秀的智能体不逊色于研究员
当然,仅有实验平台还不够。真正有趣的问题是:当你准备好机器人、GPU和Token之后,智能体到底会不会做研究?
ENPIRE给出的答案是:会,而且确实像模像样。
论文在四个高难度灵巧操作任务上进行了验证:Push-T(推动T形积木到目标位置)、Pin Insertion(将针插入4毫米孔径)、GPU Insertion(将GPU插入主板插槽)以及Zip-tie(扎带穿扎与剪切)。最终四个任务全部达到了99%的成功率。
但比结果更有意思的,是智能体达到这个结果的过程。最典型的例子是Pin Insertion任务,论文直接公开了智能体的想法树(Idea Tree)——完整的研究思路演化过程。从中可以清楚看到一条非常熟悉的研究路径:先尝试行为克隆,效果一般;加入在线强化学习数据,性能开始提升;再增加正则化项,成功率出现明显跃升;随后调整Batch Size,补偿控制器延迟,进一步提升稳定性。
整个过程中,智能体就像人类研究员一样,一步一步试探,一路把成功率从接近零推到接近100%。没有人告诉它应该加什么模块,也没有人规定实验顺序。所有方案都来自它自己提出的假设,再通过真实实验验证。如果把这些记录隐藏起来,只看研究过程,很难说这和一个机器人博士研究生在实验室里做研究有什么本质区别。
更有意思的是,智能体甚至会根据任务特点主动改变研究路线。在Zip-tie任务中,它很快发现端到端训练效果不好——因为这个任务实在太长:找到剪刀→抓起剪刀→找到扎带→对准位置→完成剪切。整个操作链跨越多个阶段,单纯依赖端到端策略很难学好。于是智能体自己换了一条路线:先利用VLA模型(Vision-Language-Action)完成粗定位,再调用工具API执行精细操作。某种程度上,它甚至自己做了一次系统架构设计。
如果要找一个最直接的参照物,那就是Karpathy前段时间提出的“自动研究(Autoresearch)”。两者本质上都在做同一件事:让AI自动提出想法、运行实验、比较结果,再根据结果继续迭代。区别在于,Autoresearch发生在数字世界,代码写崩了可以重来,实验跑崩了可以重启,算力几乎是唯一成本。而ENPIRE第一次把这套研究循环搬进了物理世界——机器人不是代码,你没法对一台撞坏的机械臂执行Git Revert。真实世界里,摩擦力在变化,物体位置在变化,光照在变化,传感器也会产生噪声。
ENPIRE的核心价值,就是通过自动复位、自动评分和安全控制接口,把原本混乱的物理世界包装成智能体能够反复调用的实验环境。对于智能体来说,真实世界第一次拥有了类似软件开发环境的可迭代性。
另一个有趣的发现,是所谓的“物理扩展”(Physical Scaling Law)。过去大模型扩展的是参数、数据和算力;ENPIRE开始扩展实验数量。论文里,8个智能体分别占用8台机器人,同时探索不同路线。结果Pin Insertion任务达到目标成功率的时间,从单机器人模式下的1.5小时缩短到40分钟。
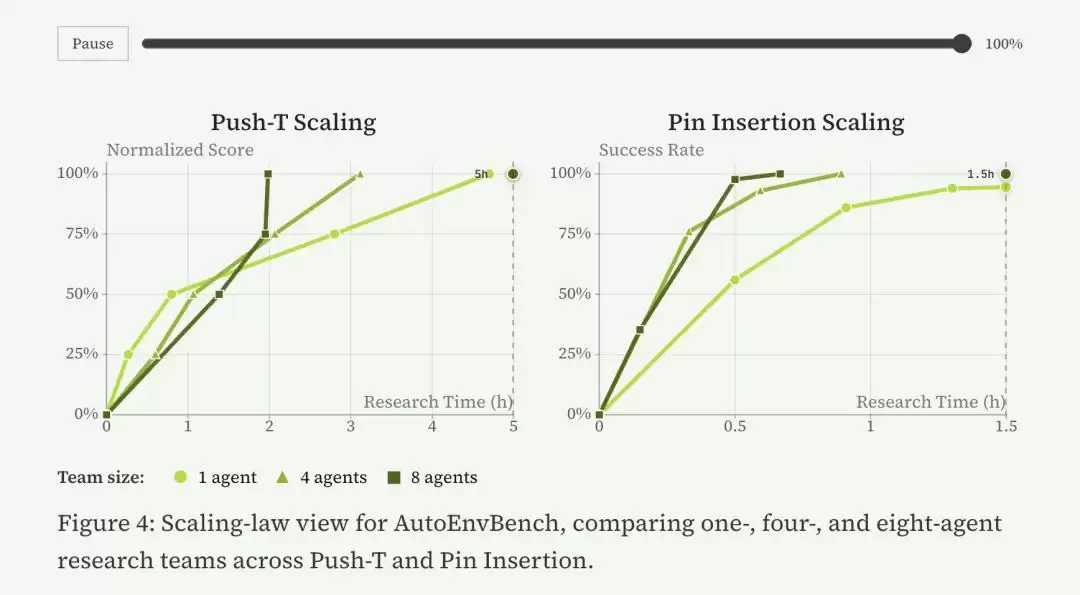
换句话说,如果过去的大模型是在扩展GPU集群,那么ENPIRE扩展的则是机器人舰队。
当然,这种扩展并不廉价。随着智能体数量增加,每个智能体都需要阅读其他智能体的代码、理解他人的发现、总结经验并同步知识。Token消耗增长得比机器人数量更快。论文甚至专门提出两个指标来衡量这种代价:Mean Robot Utilization(机器人有多少时间真正用于实验)和Mean Token Utilization(系统每分钟究竟消耗多少Token)。
看到这里,大概也能理解为什么Jim Fan会如此兴奋——因为他们发现,研究本身似乎也开始具备了可扩展性。甚至连经验传承都出现了:论文里有个很有意思的实验,智能体在Pin Insertion任务中积累的经验被整理成一份文字总结,然后直接塞进GPU Insertion任务的Prompt里。结果后续研究效率明显提升。注意,这里迁移的既不是模型权重,也不是训练数据,而是一份研究笔记——和人类实验室传帮带时做的事情,几乎一模一样。
大平行(The Great Parallel)的最后一块拼图
今年5月,Jim Fan在红杉资本AI Ascent大会上提出了“大平行”(The Great Parallel)框架:机器人领域正在加速重走大语言模型走过的路。
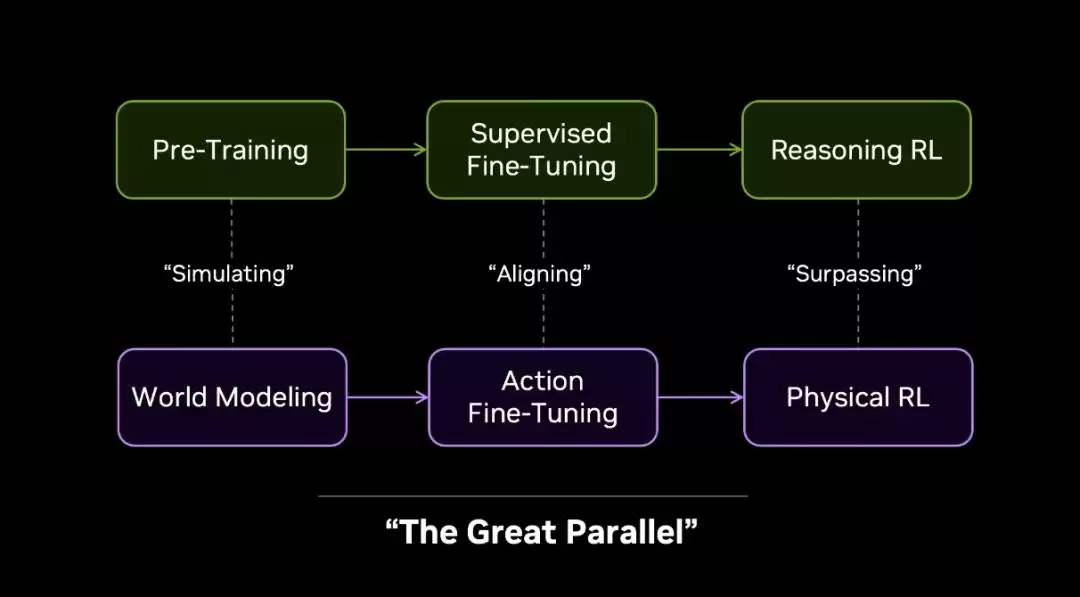
对照语言模型经历的四个阶段——预训练、对齐微调、强化学习推理、自主研究——机器人也在走同样的四步,只不过每一步的介质从文本变成了物理世界。前三步英伟达已经有了对应的布局:预训练阶段有EgoScale(用两万小时人类第一视角视频训练运动先验)和DreamZero(一种全新的世界动作模型,用视频世界模型预测下一物理状态,替代语言模型预测下一token);对齐阶段用少量传感化人类数据做动作微调;强化学习阶段有Dream Dojo(一个纯神经仿真器,不用物理引擎,直接用视频世界模型生成模拟环境,让机器人在“梦境”里做RL)。
但第四步——自主研究——在物理世界一直没有可执行的实现。ENPIRE,就是这一步。
一作肖文力(Wenli Xiao)在推特上写道:“自动研究(Autoresearch)终于离开了沙盒,进入了具身世界。”
肖文力是CMU机器人系博士生,导师是石冠亚(Guanya Shi),此前在英伟达GEAR实验室实习了两年。这篇论文有四位共同一作。
肖文力、谢佳(Jia Xie)、Tonghe Zhang、Haotian Lin,全部来自CMU,三位共同指导教师分别是范麟熙(Jim Fan)、朱玉可(Yuke Zhu)(均来自英伟达)和石冠亚(CMU)。
Jim Fan在推特上对ENPIRE的描述,大概是整篇论文最有画面感的概括:
我们给8个Codex agent一个机器人舰队、一批GPU和充足的token预算。然后人类退场。机器人舰队开始活过来:它们学会寻找视觉线索,重置场景,练习新技能,修改控制栈,在线读论文,辩论,反思,卡壳,再直接在硬件上重试。我们所做的一切,就是给Codex一个通往原子世界的API。剩下的是涌现。
ENPIRE将全部开源。理论上,每个人都可以搭建自己的“自运行机器人实验室”。前提是——你得买得起那8台机器人、英伟达的GPU,以及跑code agent的token。
参考链接
[1]https://x.com/_wenlixiao/status/2066913196641071464
[2]https://research.nvidia.com/labs/gear/enpire/#fleet-scaling
你是一名 AI 行业编辑,请围绕下面这条热点输出一份资讯解读:
热点:英伟达启动机器人自主研发项目要求:
1. 先用一句话解释这条热点在讲什么
2. 再总结它为什么重要
3. 说明会影响哪些 AI 产品或内容方向
4. 最后给出 3 个适合资讯站使用的标题
游乐网为非赢利性网站,所展示的游戏/软件/文章内容均来自于互联网或第三方用户上传分享,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系youleyoucom@outlook.com。
 相关热点
相关热点京东近日发布了国内首个专门为智能体自主支付设计的协议——A2P2协议。该协议将AI支付自主化程度系统性地划分为L0至L5六个等级,重点聚焦L3和L4级别,让智能体能在用户设定的规则边界内自主完成支付。为确保安全,协议首创了ARI机制,在支付时实时核验用户、智能体身份及运行环境,并采用资金账户隔离设计
VGN推出新款霓虹75Air磁轴键盘,单模有线版售价259元,三模无线版售价339元。该键盘采用75%配列,搭载天霸Air轴,主打电竞级性能,支持8kHz回报率、128kHz扫描率以及0 1ms低延迟,并具备0 005mm精度的RapidTrigger快速触发功能。外观上配备雾透键帽与霓虹灯带,
爱国者御风F90机箱上市,采用十字散热风道与MESH网孔面板,最多可装10个风扇,支持顶部和前部360水冷。兼容ATX主板,CPU散热器限高170mm,显卡限长395mm,提供2个3 5英寸和2个2 5英寸硬盘位,有黑、白两色可选。
北京越野BJ81“战术方盒子”硬派SUV的申报信息于近日公布。新车采用标志性方盒子造型,提供6座布局,车身尺寸为4850×2050×1975mm,轴距2810mm。本次申报新增了运动版BJ81VJ,升级22英寸轮圈、305 45宽胎等运动套件。动力方面搭载1 5T增程系统,电池来自宁德时代。新车预售
- 日榜
- 周榜
- 月榜
热点快看