




面向ROS开发者的NVIDIA AI Perception实战教程全面解析与案例详解

所有移动的事物都将走向自主化,而自主化的核心离不开先进的实时感知能力。 NVIDIA 近日宣布了一项重大举措:向 ROS 开发者社区提供完整的感知技术栈。对于正在尝试将计算机视觉与 AI ML 功能融入机器人应用的开发者而言,这无疑能够大幅缩短开发周期,同时充分释放硬件性能潜力。 **Open Ro
 **Open Robotics 将扩展 ROS 对 NVIDIA AI 的支持**
Open Robotics 首席执行官 Brian Gerkey 表示:“随着越来越多的 ROS 开发者开始采用具备额外计算能力的硬件平台——这些平台专门用于减轻主 CPU 的负担——ROS 本身也在不断进化,以更高效地利用这些先进硬件资源。我们与 NVIDIA 这样的加速计算领域专家合作,结合他们在 AI 和机器人方面的深厚积累,这对整个 ROS 社区来说是一件大好事。”
具体而言,NVIDIA 与 Open Robotics 已达成合作:在 NVIDIA Jetson 边缘 AI 平台及基于 GPU 的系统中加速 ROS 2 性能,同时实现 Omniverse 上 Open Robotics 的 Ignition Gazebo 与 NVIDIA Isaac Sim 之间的无缝模拟互操作。
Jetson 平台在机器人领域已广为人知并被广泛采用。其设计初衷是为机器人提供高吞吐量、低延迟的处理能力,使机器人更敏捷、更安全、更易于协作。Open Robotics 将升级 ROS 2,使其能够高效管理 Jetson 上 GPU 与其他处理器之间的数据流和内存共享,从而显著提升负责实时处理摄像头、激光雷达等高带宽传感器数据的应用性能。
除了优化机器人在 Jetson 上的运行性能,双方还计划整合 Ignition Gazebo 与 NVIDIA Isaac Sim。Isaac Sim 已开箱支持 ROS 1 和 ROS 2,并通过连接 Blender、Unreal Engine 4 等流行工具,构建了至关重要的 3D 内容生态。
Ignition Gazebo 在机器人领域已有多年应用历史,甚至在 DARPA 地下挑战赛等顶级赛事中也有出色表现。
通过连接这两个模拟器,ROS 开发者能够轻松地在 Ignition Gazebo 与 Isaac Sim 之间迁移机器人和环境,运行大规模模拟,并充分利用两个模拟器的先进功能——如高保真动力学、精确传感器模型、逼真渲染——来生成用于训练和测试 AI 模型的合成数据。
这次合作的软件成果预计将于 2022 年春季发布。
**专为 ROS 发布的 Isaac GEM 性能显著提升**
用于 ROS 的 Isaac GEM 是一套硬件加速包,旨在帮助 ROS 开发者更轻松地在 Jetson 上构建高性能解决方案。这些 GEM 专注于提升图像处理和基于深度神经网络(DNN)的感知模型吞吐量——这两项能力对机器人专家而言日益重要。它们能够减轻主 CPU 的负载,同时显著提升整体性能。
**用于 ROS 的全新 Isaac GEM 包含:**
- SGM Stereo Disparity 和 Point Cloud
- Color Space Conversion 和 Lens Distortion Correction
- AprilTags Detection
**Open Robotics 将扩展 ROS 对 NVIDIA AI 的支持**
Open Robotics 首席执行官 Brian Gerkey 表示:“随着越来越多的 ROS 开发者开始采用具备额外计算能力的硬件平台——这些平台专门用于减轻主 CPU 的负担——ROS 本身也在不断进化,以更高效地利用这些先进硬件资源。我们与 NVIDIA 这样的加速计算领域专家合作,结合他们在 AI 和机器人方面的深厚积累,这对整个 ROS 社区来说是一件大好事。”
具体而言,NVIDIA 与 Open Robotics 已达成合作:在 NVIDIA Jetson 边缘 AI 平台及基于 GPU 的系统中加速 ROS 2 性能,同时实现 Omniverse 上 Open Robotics 的 Ignition Gazebo 与 NVIDIA Isaac Sim 之间的无缝模拟互操作。
Jetson 平台在机器人领域已广为人知并被广泛采用。其设计初衷是为机器人提供高吞吐量、低延迟的处理能力,使机器人更敏捷、更安全、更易于协作。Open Robotics 将升级 ROS 2,使其能够高效管理 Jetson 上 GPU 与其他处理器之间的数据流和内存共享,从而显著提升负责实时处理摄像头、激光雷达等高带宽传感器数据的应用性能。
除了优化机器人在 Jetson 上的运行性能,双方还计划整合 Ignition Gazebo 与 NVIDIA Isaac Sim。Isaac Sim 已开箱支持 ROS 1 和 ROS 2,并通过连接 Blender、Unreal Engine 4 等流行工具,构建了至关重要的 3D 内容生态。
Ignition Gazebo 在机器人领域已有多年应用历史,甚至在 DARPA 地下挑战赛等顶级赛事中也有出色表现。
通过连接这两个模拟器,ROS 开发者能够轻松地在 Ignition Gazebo 与 Isaac Sim 之间迁移机器人和环境,运行大规模模拟,并充分利用两个模拟器的先进功能——如高保真动力学、精确传感器模型、逼真渲染——来生成用于训练和测试 AI 模型的合成数据。
这次合作的软件成果预计将于 2022 年春季发布。
**专为 ROS 发布的 Isaac GEM 性能显著提升**
用于 ROS 的 Isaac GEM 是一套硬件加速包,旨在帮助 ROS 开发者更轻松地在 Jetson 上构建高性能解决方案。这些 GEM 专注于提升图像处理和基于深度神经网络(DNN)的感知模型吞吐量——这两项能力对机器人专家而言日益重要。它们能够减轻主 CPU 的负载,同时显著提升整体性能。
**用于 ROS 的全新 Isaac GEM 包含:**
- SGM Stereo Disparity 和 Point Cloud
- Color Space Conversion 和 Lens Distortion Correction
- AprilTags Detection
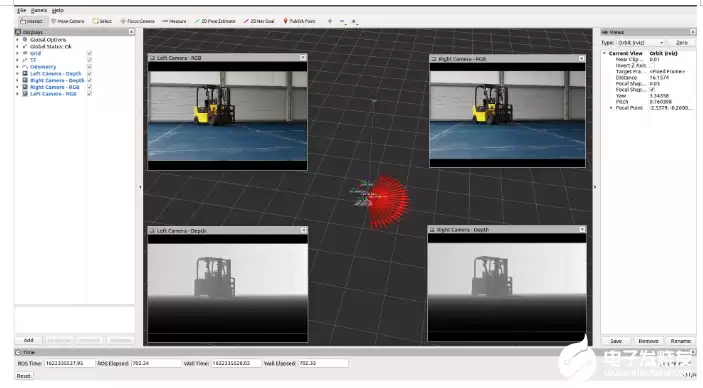 图1:ROS 对立体相机的支持,在 ROS 的 Rviz 工具中可显示左右相机视图。Rviz 能够展示 RGB 和深度图像。
**Isaac Sim 新增功能,为 ROS 开发者带来便利**
最新版 Isaac Sim 对 ROS 开发者社区提供了出色的支持,其中最引人注目的是 ROS2 导航栈和 MoveIt 运动规划框架。这些示例目前即可直接使用,详细说明可在 Isaac Sim 文档中找到。
**Isaac Sim 中的 ROS 示例列表**
- ROS April Tag
- ROS Stereo Camera
- ROS Navigation
- ROS TurtleBot3 Sample
- ROS Manipulation 和 Camera Sample
- ROS Services
- MoveIt Motion Planning Framework
- Native Python ROS Usage
- ROS2 Navigation
图1:ROS 对立体相机的支持,在 ROS 的 Rviz 工具中可显示左右相机视图。Rviz 能够展示 RGB 和深度图像。
**Isaac Sim 新增功能,为 ROS 开发者带来便利**
最新版 Isaac Sim 对 ROS 开发者社区提供了出色的支持,其中最引人注目的是 ROS2 导航栈和 MoveIt 运动规划框架。这些示例目前即可直接使用,详细说明可在 Isaac Sim 文档中找到。
**Isaac Sim 中的 ROS 示例列表**
- ROS April Tag
- ROS Stereo Camera
- ROS Navigation
- ROS TurtleBot3 Sample
- ROS Manipulation 和 Camera Sample
- ROS Services
- MoveIt Motion Planning Framework
- Native Python ROS Usage
- ROS2 Navigation
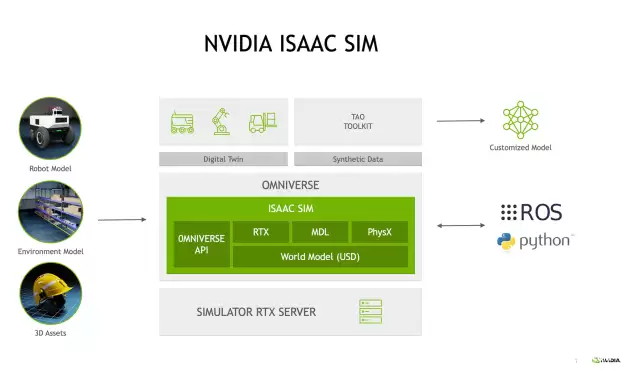 图2:Isaac Sim on Omniverse 功能模块图,包含机器人模型、环境模型和 3D 资料输入。
**Isaac Sim 生成合成数据集,用于感知训练**
Isaac Sim 不仅仅是一个机器人模拟器,它还具备强大的合成数据生成能力,可用于训练和测试感知模型。随着越来越多的机器人专家将感知功能集成到平台中,这些功能的重要性日益凸显。简而言之,机器人对环境感知越清晰,其自主性就越强,所需的人工干预就越少。
Isaac Sim 生成的合成数据集可以直接输入 NVIDIA TAO——一个 AI 模型自适应平台——从而根据机器人的具体工作环境调整感知模型。这意味着,在从目标环境采集任何真实数据之前,就能确保机器人的感知栈在特定工作环境中表现出色。
长期以来,机器人专家在连接和集成经典机器人任务(如导航)与 AI 感知栈方面一直面临挑战。Isaac Sim 通过同时扮演机器人模拟器和合成数据生成工具,并与 TAO 训练平台集成,一举解决了这一工作流难题。
图2:Isaac Sim on Omniverse 功能模块图,包含机器人模型、环境模型和 3D 资料输入。
**Isaac Sim 生成合成数据集,用于感知训练**
Isaac Sim 不仅仅是一个机器人模拟器,它还具备强大的合成数据生成能力,可用于训练和测试感知模型。随着越来越多的机器人专家将感知功能集成到平台中,这些功能的重要性日益凸显。简而言之,机器人对环境感知越清晰,其自主性就越强,所需的人工干预就越少。
Isaac Sim 生成的合成数据集可以直接输入 NVIDIA TAO——一个 AI 模型自适应平台——从而根据机器人的具体工作环境调整感知模型。这意味着,在从目标环境采集任何真实数据之前,就能确保机器人的感知栈在特定工作环境中表现出色。
长期以来,机器人专家在连接和集成经典机器人任务(如导航)与 AI 感知栈方面一直面临挑战。Isaac Sim 通过同时扮演机器人模拟器和合成数据生成工具,并与 TAO 训练平台集成,一举解决了这一工作流难题。 你是一名 AI 行业编辑,请围绕下面这条热点输出一份资讯解读:
热点:面向ROS开发者的NVIDIA AI Perception实战教程全面解析与案例详解要求:
1. 先用一句话解释这条热点在讲什么
2. 再总结它为什么重要
3. 说明会影响哪些 AI 产品或内容方向
4. 最后给出 3 个适合资讯站使用的标题
游乐网为非赢利性网站,所展示的游戏/软件/文章内容均来自于互联网或第三方用户上传分享,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系youleyoucom@outlook.com。
 相关热点
相关热点Daetama是面向数据科学面试和SQL能力提升的练习平台,已收录超100个覆盖基础到进阶的SQL题目,求职板块与课程模块在开发中,团队保持每周更新节奏,提供系统性刷题与模拟面试场景。
SpeakMulti是一款AI驱动的配音平台,可将YouTube视频翻译成多种语言,保留原始说话者的音色和语调,降低本地化成本。用户提交视频并选择目标语言后,AI自动完成配音,并由专家团队审核,确保准确自然。
需求人群 如果你经常需要从图片中提取文字——例如整理截图内容、翻译图片里的外语文本、识别带有水印的图片信息——那么 Umi-OCR 无疑是一款相当实用的工具。它完全在本地运行,无需联网,对隐私保护极为友好。 产品特色 这款工具的核心亮点都集中在实用性上。截屏识别操作非常顺手,按下快捷键即可框选区域,
艺术创作与人工智能的融合,正在开启一个全新的创作时代。moonlightai 正是这样一款AI绘画工具,能够帮助用户通过人工智能快速生成不同风格的绘画作品——无论你想复刻文艺复兴时期的古典优雅,还是为画作注入梵高般炽热的笔触,甚至从艾沃佐夫斯基的海浪星空中汲取灵感,它都能轻松实现。 需求人群 简单来
- 日榜
- 周榜
- 月榜
热点快看