




Socionext与东北大学联合加速深度学习SLAM处理

近期,Socionext 与日本东北大学 Okatani 教授团队联合宣布了一项重大突破——他们成功将 SLAM(同步定位与建图)的处理时间压缩至传统方法的六十分之一。这一成果已被计算机视觉顶级会议 ICCV 接收,并在 2021 年的线上会议中正式发布。作为自主设备的核心技术之一,SLAM 根据感
近期,Socionext 与日本东北大学 Okatani 教授团队联合宣布了一项重大突破——他们成功将 SLAM(同步定位与建图)的处理时间压缩至传统方法的六十分之一。这一成果已被计算机视觉顶级会议 ICCV 接收,并在 2021 年的线上会议中正式发布。
作为自主设备的核心技术之一,SLAM 根据感知方式主要分为两大类:一类依赖激光测距的 LiDAR SLAM,另一类基于摄像头图像的 Visual SLAM。近年来,Visual SLAM 发展势头强劲,原因在于摄像头成本低廉,且能够将定位与图像识别功能整合,极大扩展了应用场景。
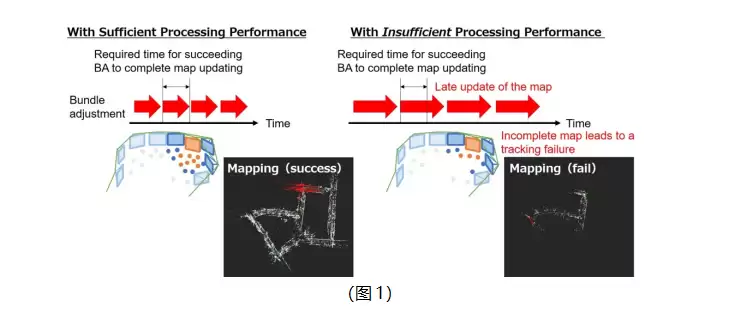
深度学习技术的引入推动了图像识别能力的飞跃,也为 Visual SLAM 注入了全新动力。然而,束调整(Bundle Adjustment, BA)始终是绕不开的关键瓶颈。BA 负责优化 3D 地图点和相机位姿,计算量极其庞大,尤其在边缘设备上,受限于 CPU 性能与功耗控制,传统方法运行十分吃力,严重制约了实际部署。
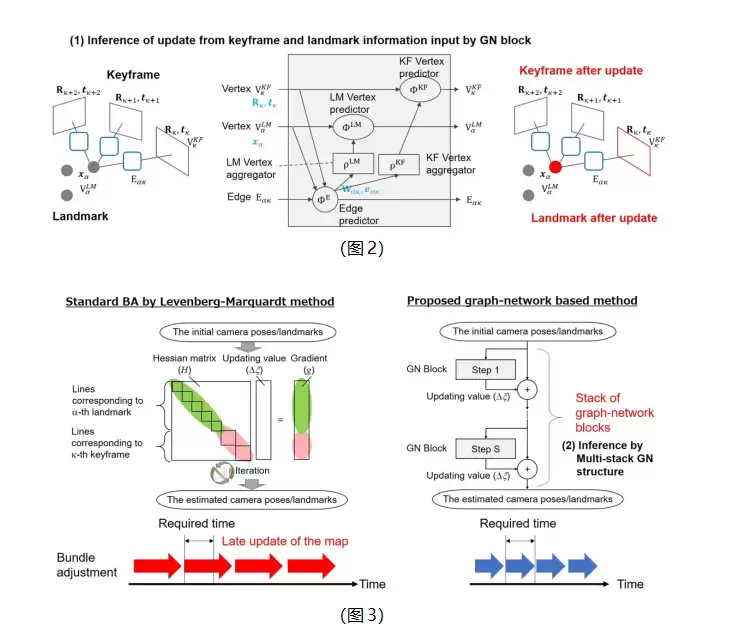
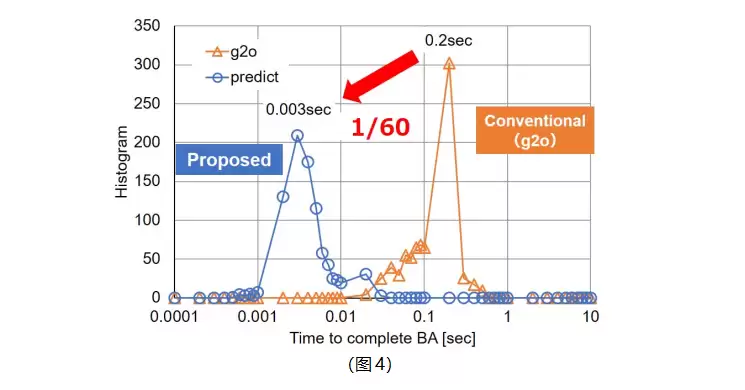
如何破解这一难题?研究团队提出了一种创新思路:利用图神经网络(Graph Network)进行近似推理。具体而言,从图神经网络模块输入关键帧与地标信息,让网络直接推断出更新量,再通过多层堆叠结构逐步收敛到最终结果。相比传统 Levenberg‑Marquardt 优化方法,这种推理方式显著降低了计算负担。
为验证效果,团队将这套新方法应用于 Visual SLAM 的束调整环节,并与业界常用的 g2o 框架进行了对比。PC 仿真结果表明,新方法的处理时间仅为 g2o 的六十分之一,效果令人震撼。
对 Socionext 而言,这项研究不仅是学术上的突破,更是产品化的重要起点。他们计划将 Visual SLAM 技术集成到定制 SoC 方案中,为工业设备、移动平台等有图像识别需求的客户带来性能跃升。与此同时,团队将继续挖掘这种推理方法的潜力,力争将其扩展至图像识别以外的更多领域。
关于 Socionext Inc.
Socionext 是一家全球领先的片上系统(SoC)设计、研发与销售企业,聚焦消费电子、汽车及工业领域的先进技术。公司成立于 2015 年,总部位于日本横滨,并在亚洲、美国、欧洲设有办事处,致力于为客户提供高效的解决方案与卓越体验。
你是一名 AI 行业编辑,请围绕下面这条热点输出一份资讯解读:
热点:Socionext与东北大学联合加速深度学习SLAM处理要求:
1. 先用一句话解释这条热点在讲什么
2. 再总结它为什么重要
3. 说明会影响哪些 AI 产品或内容方向
4. 最后给出 3 个适合资讯站使用的标题
游乐网为非赢利性网站,所展示的游戏/软件/文章内容均来自于互联网或第三方用户上传分享,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系youleyoucom@outlook.com。
 相关热点
相关热点在MacM系列芯片上使用Codex插件出现卡顿,主要源于默认运行模式未适配AppleSilicon架构。首先需确认VSCode是否通过Rosetta转译运行,并强制其以ARM64原生模式启动。随后配置专为ARM64优化的Python虚拟环境,安装支持MPS加速的PyTorch,并在插件中切换解释器。同时调整HuggingFace参数,启用CoreML、强制使
启用DevMode后,通过删除线检查CSS兼容性,以px hex格式提取跨平台代码,并在Properties页签验证变量映射,避免硬编码“幽灵值”,从而确保开发交付的准确性和一致性。
在ComfyUI中使用IPAdapter时,提示词需与参考图形成语义锚定,明确主体身份、风格强化短语及权重标记。多图混合可采用单节点统一加权或多节点并行,权重之和不宜超1 8。避免引导词和抽象描述,改用具体特征如发型、眉形,且侧脸需标明朝向。
Genspark通过识别起因类型,将事件经过按主体动作、即时反馈、跨域扩散三层动态建模,并支持追问补全因果关系,最终输出带来源锚点和置信度标签的交互式因果图谱,便于直观掌握事件演变脉络。
- 日榜
- 周榜
- 月榜
热点快看