




OpenClaw控制机器人配置总结

架构说明
免费影视、动漫、音乐、游戏、小说资源长期稳定更新! 👉 点此立即查看 👈
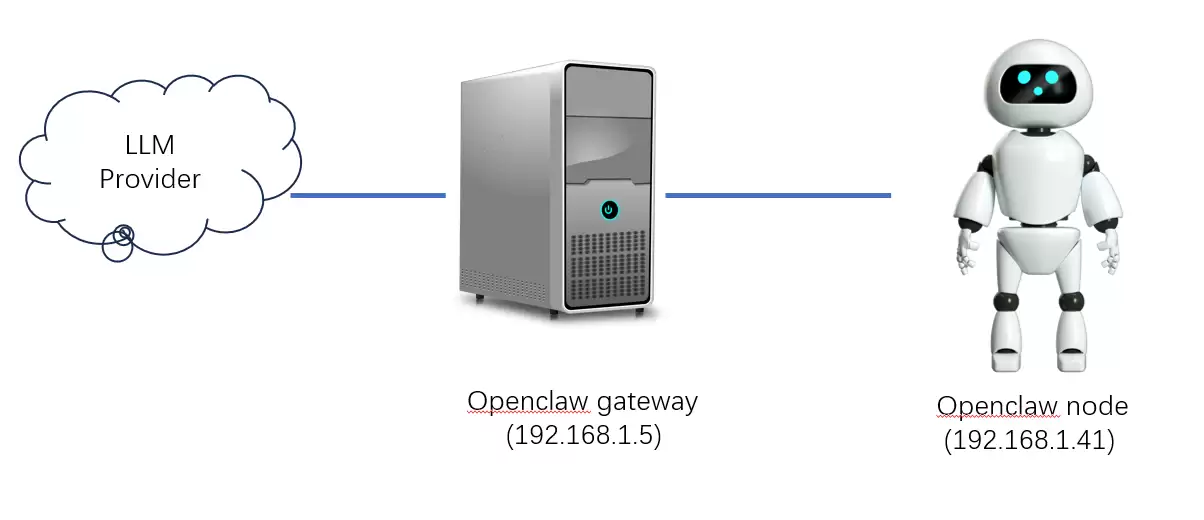
整个部署架构其实很清晰,主要就两个核心角色:
- OpenClaw Gateway机器:作为控制中心,IP地址是 192.168.1.5。
- OpenClaw Node 机器人:通常部署在树莓派这类设备上,它才是真正干活儿的执行端,负责提供摄像头、麦克风、扬声器等硬件能力。
它们之间的连接方式也很直接:通过 WebSocket 协议进行内网直连。这里有个关键点,为了在内网环境下简化配置,我们通过设置环境变量,允许使用明文的 ws:// 连接。当然,如果涉及到跨公网,那就必须切换为加密的 wss:// 或者使用 SSH 隧道了。
Gateway 配置关键点
要让 Gateway 准备好接收 Node 的连接,配置上需要关注几个核心参数。下面这段配置示例可以说把要点都涵盖了:
{
"port": 18789,
"mode": "local",
"bind": "lan", // 监听所有网络接口
"auth": {
"mode": "token", // 使用 token 认证
"token": "xxx" // 节点连接时需提供此 token
}
}简单来说,就是让 Gateway 在本地模式运行,监听所有局域网接口,并启用 Token 认证机制来确保只有合法的 Node 才能接入。
Node 配置步骤
Node 端的配置,核心思路是将其包装成一个系统服务,确保它能随系统启动、异常退出后能自动恢复。下面我们一步步拆解。
1. 创建服务文件
首先,我们需要创建一个 systemd 服务文件,这是实现后台稳定运行的关键。文件内容大致如下:
[Unit] Description=OpenClaw Node Service After=network.target Wants=network.target [Service] Type=simple User=jack Group=jack WorkingDirectory=/home/jack EnvironmentFile=/home/jack/.openclaw/openclaw-node.env ExecStart=/usr/bin/openclaw node run --host $OPENCLAW_GATEWAY_HOST --port $OPENCLAW_GATEWAY_PORT --display-name "RaspPi-node" Restart=always RestartSec=10 StandardOutput=journal StandardError=journal [Install] WantedBy=multi-user.target
这个服务文件有几个配置项值得特别说明:
| 配置项 | 作用 | 备注 |
|---|---|---|
OPENCLAW_ALLOW_INSECURE_PRIVATE_WS=1 |
允许明文 ws:// 连接 | 仅用于可信内网,跨网需用 wss:// 或 SSH 隧道 |
EnvironmentFile |
分离敏感配置 | 便于管理和权限控制 |
Restart=always |
自动重连 | 网络断开或进程崩溃时自动恢复 |
这里有个小提示:如果 Gateway 的配置中 bind 参数设置的是 loopback(这是本地模式的默认值),那么远程的 Node 是无法直接连接它的。这时候,SSH 隧道就成了一个优雅的解决方案。
# 终端A:在Gateway机器上,将本地端口转发出去
ssh -N -L 18790:127.0.0.1:18789 user@gateway-host
# 终端B:Node通过本地隧道端口连接
export OPENCLAW_GATEWAY_TOKEN=""
openclaw node run --host 127.0.0.1 --port 18790 --display-name "Build Node" 2. 创建环境文件
敏感信息和连接参数最好独立出来,放在环境变量文件里。我们通常将其放在 /home/jack/.openclaw/openclaw-node.env。
OPENCLAW_GATEWAY_HOST=192.168.1.5 # Gateway IP
OPENCLAW_GATEWAY_PORT=18789 # Gateway 端口
OPENCLAW_ALLOW_INSECURE_PRIVATE_WS=1 # 允许内网明文连接
OPENCLAW_GATEWAY_TOKEN=f3b04ac3b2aa... # Gateway token3. 创建 systemd 符号链接
为了让系统识别我们的服务,需要创建一个符号链接到 systemd 的系统目录。
sudo ln -s /home/jack/.openclaw/openclaw-node.service /etc/systemd/system/openclaw-node.service4. 设置权限(安全)
由于环境文件包含了 Token 等敏感信息,务必限制其访问权限。
chmod 600 /home/jack/.openclaw/openclaw-node.env5. 启动并启用服务
最后,重载 systemd 配置,启动服务并设置开机自启。
sudo systemctl daemon-reload
sudo systemctl start openclaw-node.service
sudo systemctl enable openclaw-node.service6. Node权限配置
配置到这一步,Node 已经能连上 Gateway 了。但每次在 Gateway 上通过命令行向 Node 发送指令时,可能还会弹出一个授权确认框。为了提高自动化程度,我们可以预先配置好命令执行的白名单。
# 首先,查看一下当前针对 “RaspPi-node” 的审批配置
openclaw approvals get --node "RaspPi-node"
# 然后,为这个节点添加允许列表。有两种思路:
# 方法1:添加通配符,允许执行任何命令(适合完全受控的测试环境)
openclaw approvals allowlist add --node "RaspPi-node" "*"
# 方法2:精细化控制,只添加常用目录的允许列表(更安全)
openclaw approvals allowlist add --node "RaspPi-node" "/usr/bin/*"
openclaw approvals allowlist add --node "RaspPi-node" "/bin/*"
openclaw approvals allowlist add --node "RaspPi-node" "/usr/local/bin/*"
openclaw approvals allowlist add --node "RaspPi-node" "/home/jack/*"
# 如果追求便利性,通常推荐直接使用通配符 “*”总结:OpenClaw添加新Node的步骤
好了,我们把整个流程串起来看,添加一个新 Node 其实就是以下几个标准动作:
-
在新机器上安装 OpenClaw:这是前提。
-
复制并修改模板文件:
mkdir -p ~/.openclaw # 复制服务文件模板,记得修改里面的 display-name # 复制环境文件模板,修改必要的连接配置 -
修改环境文件:这是连接的关键,确保以下变量正确:
OPENCLAW_GATEWAY_HOST: 填写 Gateway 的 IP 地址。OPENCLAW_GATEWAY_TOKEN: 填写从 Gateway 获取的 Token。- 保持
OPENCLAW_ALLOW_INSECURE_PRIVATE_WS=1(仅限内网环境)。
-
创建符号链接并启动服务:即执行前面第3到第5步的操作。
-
在 Gateway 上批准配对:Node 启动后会向 Gateway 发起连接请求,需要在 Gateway 端手动批准。
# 在Gateway上列出待批准的设备 openclaw devices list # 批准特定的连接请求 openclaw devices approve# 当然,更直观的方式是直接登录 OpenClaw Gateway 的 Web 管理界面进行操作。 -
验证与测试:部署完成后,别忘了做一次健康检查。
# 查看服务运行状态 sudo systemctl status openclaw-node.service # 查看实时日志,排查问题 sudo journalctl -u openclaw-node.service -f # 在 Gateway 上确认节点状态 openclaw nodes status # 测试节点功能是否正常,例如列出摄像头 openclaw nodes camera list --node "节点名"
常见问题速查
最后,附上一个常见问题排查表,遇到问题时可以快速对照:
| 问题 | 解决方案 |
|---|---|
Failed to load environment files |
检查环境文件路径是否正确,以及文件是否存在。 |
SECURITY ERROR |
确认环境变量中已设置 OPENCLAW_ALLOW_INSECURE_PRIVATE_WS=1。 |
| 配对失败 | 在 Gateway 上执行 openclaw devices list 查看是否有待处理的连接请求。 |
| 连接不稳定 | 检查 Node 与 Gateway 之间的网络连通性,以及防火墙是否放行了相关端口。 |

游乐网为非赢利性网站,所展示的游戏/软件/文章内容均来自于互联网或第三方用户上传分享,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系youleyoucom@outlook.com。
 同类文章
同类文章

阿里系上海创企,打造“AI记忆”,融资2.1亿
AI记忆赛道新锐:红熊AI完成2 1亿元A轮融资,估值超15亿元 AI应用风向标(公众号:ZhidxcomAI)作者|江宇编辑|漠影 企业级AI记忆领域,又迎来一个值得关注的融资事件。昨日,上海创企红熊AI正式宣布完成2 1亿元A轮融资,投后估值一举突破15亿元大关。 仔细看这轮融资的阵容,颇有看点

Openclaw报错unauthorized: gateway token mismatch
OpenClaw网关Token认证失败?一招“快捷但慎用”的解决方案 遇到OpenClaw网关仪表盘提示“token mismatch”,确实让人头疼。尤其是在尝试了常规方法——比如重新生成Token、重启gateway服务、清除浏览器缓存甚至使用openclaw doctor --fix命令之后—

京东开源图像模型 JoyAI-Image-Edit,从平面修图升级为三维空间重塑
京东开源图像模型 JoyAI-Image-Edit,从平面修图升级为三维空间重塑 4月7日,京东探索研究院正式宣布,开源自研的JoyAI-Image-Edit图像模型。这一动作,标志着图像生成与编辑领域迈入了一个新阶段。 简单来说,这次开源的核心看点在于“空间智能”。业内普遍认为,这是首个将空间理解

微软发布 Harrier 系列嵌入 AI 模型,MTEB-v2 基准测试超越谷歌夺冠
微软开源Harrier嵌入模型:为AI智能体打造更精准的“记忆中枢” 4月9日消息,微软必应团队于4月7日发布了一项重磅开源成果——Harrier文本嵌入模型系列。此举旨在回应现代AI智能体系统对信息处理日益严苛的需求。该系列模型在权威的多语言MTEB-v2基准测试中拔得头筹,标志着嵌入技术领域的一

InstantApply
InstantApply是什么 求职季一到,海投简历、重复填表、跟踪进度……这些繁琐的过程是不是让你头疼?现在,有一款工具正试图把这一切变得简单。InstantApply,正如其名,是一款旨在实现“即时申请”的AI求职助手。它由专业团队打造,核心目标很明确:化繁为简,把求职者从重复劳动中解放出来,从








- 日榜
- 周榜
- 月榜
 1
1
 2
2
 3
3
 4
5
6
7
8
9
10
1
2
3
4
5
6
7
8
9
10
1
2
3
4
5
6
7
8
9
10
相关攻略
4
5
6
7
8
9
10
1
2
3
4
5
6
7
8
9
10
1
2
3
4
5
6
7
8
9
10
相关攻略
 2015-03-10 11:25
2015-03-10 11:05
2021-08-04 13:30
2015-03-10 11:22
2015-03-10 12:39
2022-05-16 18:57
2025-05-23 13:43
2025-05-23 14:01
热门教程
2015-03-10 11:25
2015-03-10 11:05
2021-08-04 13:30
2015-03-10 11:22
2015-03-10 12:39
2022-05-16 18:57
2025-05-23 13:43
2025-05-23 14:01
热门教程
- 游戏攻略
- 安卓教程
- 苹果教程
- 电脑教程





























 热门话题
热门话题
