




Agent不会自主选择工具?别只加工具不训练

给Agent同时接上GUI操作和工具调用——听起来像是两全其美的方案,但实验结果却泼了一盆冷水:准确率反而降了。怎么回事?模型根本在GUI和Tool之间选不来路。该点按钮的时候它去调API,该调API的时候它又死磕菜单,两头乱窜,越帮越忙。为了啃下这块硬骨头,复旦大学和通义实验室MobileAgen
给Agent同时接上GUI操作和工具调用——听起来像是两全其美的方案,但实验结果却泼了一盆冷水:准确率反而降了。
怎么回事?模型根本在GUI和Tool之间选不来路。该点按钮的时候它去调API,该调API的时候它又死磕菜单,两头乱窜,越帮越忙。
为了啃下这块硬骨头,复旦大学和通义实验室MobileAgent团队联合推出了ToolCUA,一个面向GUI-Tool混合动作空间的Computer Use Agent。目标很纯粹:让模型学会什么时候走GUI,什么时候切Tool,什么时候不该调工具。
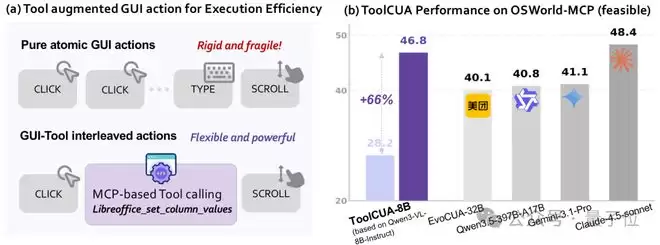
结果相当漂亮。ToolCUA-8B在OSWorld-MCP上拿到46.85%的准确率,不仅超过了Claude-4-Sonnet,还逼近了Claude-4.5-Sonnet。代码和模型权重也已全面开源。
混合动作空间下的路径困惑
传统的CUA主要依赖原子化GUI操作——点击、输入、拖拽、滚动,什么都得自己上手。这类操作的好处是泛化性强,只要界面上能看到按钮,理论上模型就能点;但短板也很明显:步骤太长,误差容易累积,在复杂任务中很容易出现 cascading errors(级联错误)。
反过来,tool calls或者说基于API的操作往往更高效、更精确。举个例子,在LibreOffice里批量处理表格,GUI-only方案可能需要一串冗长的菜单点击和参数配置,而工具调用可能一个API就搞定了。
看起来最自然的想法,是让Agent同时拥有GUI和Tool两种能力。但实验发现了一个非常反直觉的现象:直接把tools接到强模型上,并不会自动提升性能。在hybrid GUI-Tool action space里,Agent每走一步都站在一个岔路口:左边是GUI,右边是Tool。GUI泛化强但慢,Tool快但依赖覆盖范围和上下文条件。如果模型缺少路径选择能力,就会陷入两类典型失败:
- Tool underuse:明明有更高效的工具,模型却几乎只走GUI路线。
- Tool overuse:模型频繁调用工具,但调用时机不对、调用粒度不对,反而降低了任务成功率。
论文把这个问题定义为optimal GUI-Tool path selection——在长程任务中动态决定何时用GUI actions、何时调用tools,从而形成更高效、更可靠的执行路径。
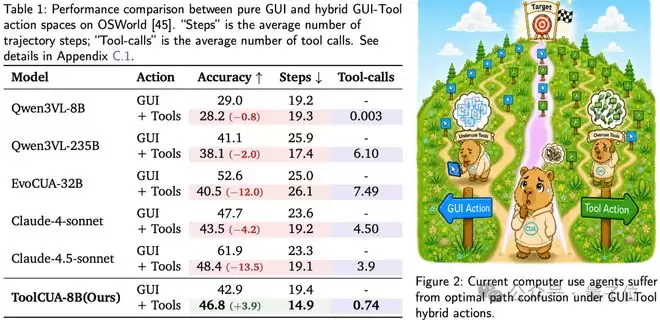
上图左侧的表格直接给出了这个反直觉现象:一旦把tools接到强模型上,结果并不总是更好。Qwen3VL-8B几乎不使用工具,平均tool calls只有0.003,准确率从29.0%降到28.2%;Qwen3VL-235B则明显更倾向于调用工具,平均tool calls达到6.10,步骤数从25.9降到17.4,但准确率反而从41.1%降到38.1%。
Claude系列同样印证了这一点。Claude-4-sonnet在加入工具后步骤数从23.6降到19.2,但准确率从47.7%降到43.5%;Claude-4.5-sonnet的步骤数从23.3降到19.1,但准确率从61.9%降到48.4%。
这说明,混合动作空间真正难的不是有没有工具,而是模型在GUI和Tool之间会不会选路。
第一阶段:数据合成与Tool-Bootstrapped RFT
要让模型学会GUI-Tool path selection,首先得有高质量的interlea ved GUI-Tool trajectories。但现实是,这类数据非常稀缺。真实工具接口往往与应用绑定、覆盖不完整,维护成本高;收集真实GUI-Tool混合轨迹又需要复杂的环境接入和人工标注。已有的GUI数据虽然规模很大,但大多是GUI-only trajectories,只教模型如何点击和输入,并没有告诉模型何时应该用工具替代冗长的GUI操作。
ToolCUA的第一步,就是把这些GUI-only数据盘活,顺便完成第一阶段的hybrid bootstrapping。论文提出了Interlea ved GUI-Tool Trajectory Scaling Pipeline:从已有GUI轨迹出发,利用MLLM合成grounded tool library,再把GUI-only trajectories转换成interlea ved GUI-Tool trajectories。
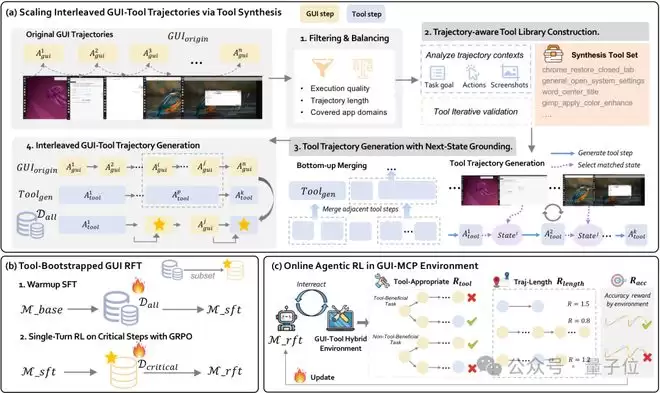
整个pipeline可以概括为三个步骤:
- Trajectory-aware synthetic tool library construction。对每条GUI轨迹,模型会分析任务目标、动作序列和截图描述,从真实操作流程中抽象出可调用的工具。例如从Chrome设置流程中抽象出
chrome_open_language_settings,从LibreOffice表格操作中抽象出读取工作簿信息、创建透视表等工具。这些工具不是凭空生成的API模板,而是grounded in concrete trajectory beha vior——从真实的GUI行为中抽象出来的工具能力。 - Tool trajectory generation with next-state grounding。给定合成工具库和原始GUI轨迹,MLLM生成一个功能等价的tool-only trajectory,并为每一步预测tool response。随后通过next-state grounding,将工具执行效果锚定到原始GUI轨迹中的下一帧截图,验证工具步骤和可见状态变化是否一致。
- Interlea ved GUI-Tool trajectory generation。最后,系统不会简单地把所有GUI操作都替换成工具,而是随机采样部分工具调用,再替换回对应的GUI子序列,形成多种GUI与Tool交错的轨迹。这个设计非常关键:它让模型看到不同tool a vailability下的决策边界,也自然产生了GUI→Tool和Tool→GUI的critical switching steps。

最终,ToolCUA的数据中大约包括了4k个unique tools,覆盖了fine-grained、mid-grained、coarse-grained多级粒度,大约有180k steps数据用于warmup SFT,还从critical steps中sample出5k条用于single-turn RL。
基于这些数据,ToolCUA进一步执行Tool-Bootstrapped GUI RFT。这一阶段的目标不是直接学完整的长程策略,而是先给模型打下一个可用的hybrid foundation。具体来说,先在D_all上进行warmup SFT,学习多模态工具调用知识——包括工具用途、参数、返回结果,以及工具执行后的状态变化。随后,模型在D_critical上进行single-turn RL,在明确的GUI-Tool switching steps上采样多个completion,并通过反馈校准模型在局部边界上的选择。简单说:先把interlea ved GUI-Tool数据合成出来,再让模型先学会用工具,并且在局部切换点上别选错。
Online Agentic RL与Tool-Efficient Path Reward
如果说第一阶段解决的是模型先要进入hybrid action space,那么第二阶段解决的就是:模型如何在真实环境里学会trajectory-level的路径选择。ToolCUA的第二阶段是Online Agentic RL。这一步不再只优化单步动作,而是在真实GUI-Tool environment中进行long-horizon rollout,让模型学习完整任务轨迹上的路径选择。团队首先构建了同时具备GUI actions和Tool calls的高可用Sandbox用于agentic RL,并且为工具返回结果设计了更加结构化的格式便于模型理解。
Agentic RL优化的核心是Tool-Efficient Path Reward:

其中,R_fmt和R_acc分别是标准格式奖励与任务成功奖励;R_tool和R_length则是ToolCUA专门设计的两项轨迹级奖励,并且它们只在成功轨迹上激活,避免模型从失败执行里学到错误偏好。
第一项是Tool Appropriateness Reward (R_tool)。
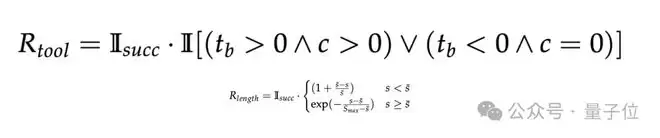
在数据构建时,每个任务会带一个task-level的tool-beneficial标记:t_b = 1表示这个任务适合用工具,t_b = -1表示这个任务不适合用工具。同时,c表示整条轨迹里的tool calls数。于是,R_tool奖励的不是工具调用更多,而是更精确的两种行为:对于适合工具的任务,成功轨迹里确实调用了工具;对于不适合工具的任务,成功轨迹里反而没有乱用工具。它要解决的正是前面提到的hybrid confusion——有些模型明明该用工具却不用,有些模型则在不该用的时候乱用。R_tool的作用,就是把“工具是否合适”这件事从任务成功里单独拎出来训练。
第二项是Path Efficiency Reward (R_length)。
这里,s是当前轨迹的步数,s是同组rollout的平均步长,S_max是最大执行步数。ToolCUA不拿一个固定阈值来判定长还是短,而是做group-relative comparison:如果某条成功轨迹比组内平均更短,就给线性bonus;如果更长,就做衰减。这样设计的好处是,模型会自然倾向于探索更短的成功路径。而在很多场景里,更短的路径恰恰意味着:用一个高层工具替代一长串冗余GUI操作。所以,R_length本质上是在鼓励模型发现更高效的GUI-Tool execution path。
这段的核心总结一下:第二阶段不是让模型调用更多工具,而是让它学会两件事——什么时候工具真的合适,什么时候这条执行路径真的更短。
OSWorld-MCP上达到46.85%,相对提升约66%
ToolCUA主要在OSWorld-MCP上评测。这个benchmark在传统OSWorld的基础上引入了hybrid GUI-Tool action space,覆盖典型GUI actions、150+ tools和主流桌面应用,很适合衡量模型在真实混合动作空间中的执行能力。
评测指标包括:Accuracy(任务成功率)、TIR (Tool Invocation Rate)(是否做对任务,并且在tool-beneficial tasks中使用工具、在non-tool-beneficial tasks中避免工具)、ACS (A verage Completion Steps)(平均完成步数,衡量执行效率)。
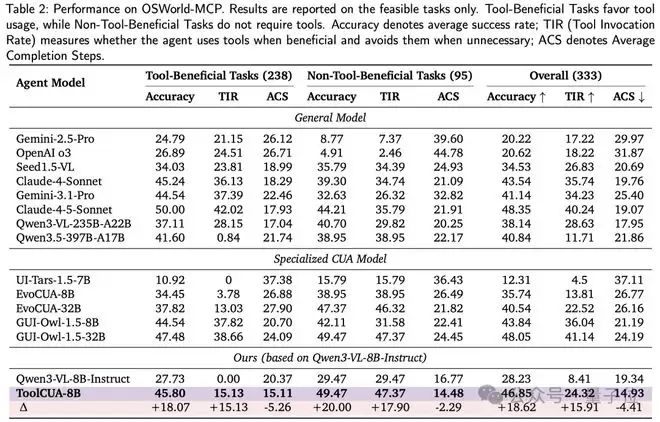
ToolCUA-8B在OSWorld-MCP上取得46.85% accuracy,相比Qwen3-VL-8B-Instruct baseline的28.23%,相对提升约66%。同时,ToolCUA超过了GUI-Owl-1.5-8B(43.84%)、Gemini-3.1-Pro(41.14%)和Claude-4-Sonnet(43.54%),并接近Claude-4.5-Sonnet(48.35%)与GUI-Owl-1.5-32B(48.05%)。
更值得关注的是效率指标。ToolCUA的ACS仅为14.93 steps,是表中所有模型里最低的。这说明ToolCUA不只是完成了更多任务,也学会了用更短路径完成任务。与Qwen3-VL-8B-Instruct相比,ToolCUA的overall TIR从8.41%提升到24.32%,ACS从19.34降到14.93——模型不仅更会做任务,也更会判断什么时候应该调用工具。
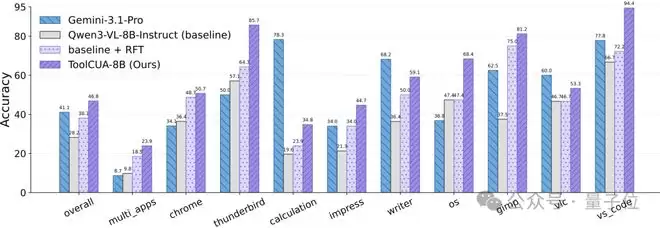
在训练阶段,Online Agentic RL只使用单应用Linux任务,并刻意排除了multi_apps domain,用于OOD验证。结果显示,在held-out multi_apps任务上,ToolCUA从baseline的9.8%和pre-online RL stage的18.5%提升到23.9%。在具体应用域上,也有明显提升:libreoffice_calculation从19.6%提升到34.8%,vs_code从66.7%提升到94.4%。
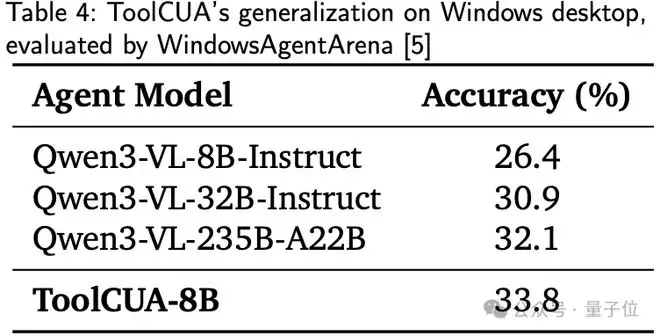
更进一步,ToolCUA还在WindowsAgentArena上进行评测。尽管训练数据和sandbox都来自Linux桌面环境,ToolCUA在unseen Windows desktop apps上达到33.8% accuracy,超过Qwen3-VL-8B-Instruct的26.4%、Qwen3-VL-32B-Instruct的30.9%,也超过Qwen3-VL-235B-A22B的32.1%。这说明ToolCUA学到的并不只是某些特定任务模板,而是更接近一种可迁移的hybrid action orchestration能力。
为什么ToolCUA真正学会了选路
ToolCUA的提升到底来自哪里?论文里的ablation很清楚地给出三条结论。
第一,如果没有interlea ved GUI-Tool trajectory data,online RL本身学不会可靠的tool use。
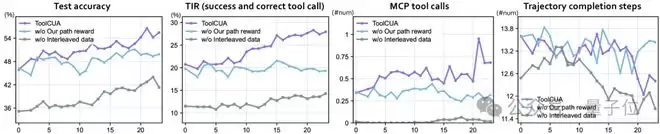
当去掉offline interlea ved GUI-Tool bootstrapping,直接从Qwen3-VL-8B-Instruct baseline开始做online agentic RL时,模型的overall accuracy虽然也会继续上升,但它很难真正学会稳定的工具调用行为。最典型的现象是:TIR长期偏低,训练后期也只到约15%;tool calls在大部分训练过程中都接近0。这说明,仅靠trajectory-level online reward,并不足以让一个GUI-centric base model自然长出靠谱的hybrid switching能力。模型需要先通过interlea ved supervision获得工具知识和切换先验。
第二,如果没有Tool-Efficient Path Reward,模型学不会稳定且高效的路径。
同样在rl_dynamics里可以看到,去掉R_tool和R_length后,只保留标准的R_acc与R_fmt,accuracy曲线会明显更不稳定,在训练step 8-11左右出现下降,最终与完整ToolCUA之间有大约7个点的差距。与此同时,TIR和tool-calls也没有稳定上升趋势,trajectory length也缺少持续下降。这说明,任务成功奖励本身不足以教会模型“什么时候工具是合适的”和“什么路径才是真正高效的”。
第三,Hybrid GUI-Tool training比pu re GUI training更有效。
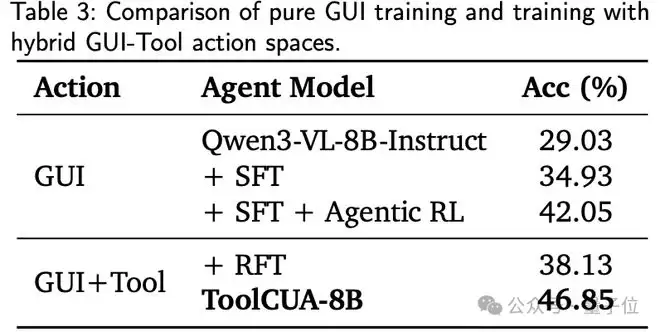
论文进一步比较了pu re GUI training和hybrid GUI-Tool training。GUI-only pipeline从baseline 29.03%提升到SFT后34.93%,再到agentic RL后42.05%;而GUI+Tool pipeline中,RFT已经达到38.13%,完整ToolCUA进一步达到46.85%。这表明hybrid GUI-Tool action space本身就是一个更高保真的训练环境。模型不只是学visual grounding,也在这个过程中学会何时应该用结构化工具替代冗余GUI操作。WindowsAgentArena的结果也说明,这种训练范式带来的不是单点收益,而是更强的跨平台泛化能力。
真正的GUI-Tool协同
为了更直观地理解ToolCUA的能力,来看两个实际案例。
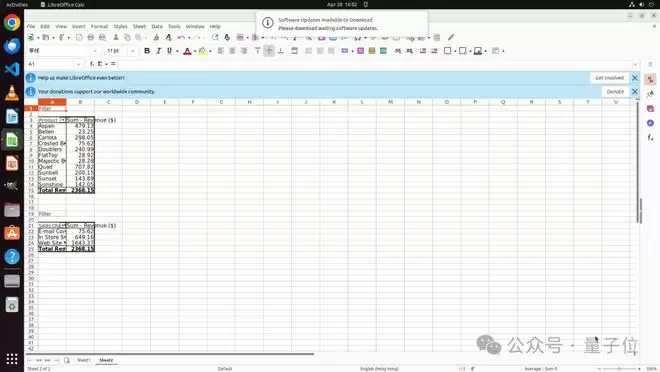
案例一:LibreOffice Calc任务。用户要求在一个名为Sheet2的新sheet中创建两个pivot tables,分别统计product和sales channel对应的total revenue。GUI-only方法通常需要选择数据范围、打开菜单、配置字段、确认参数,步骤冗长且容易出错。ToolCUA则先调用工具读取workbook信息和sheet内容,识别数据结构与字段位置,然后直接调用create_pivot_table生成透视表。
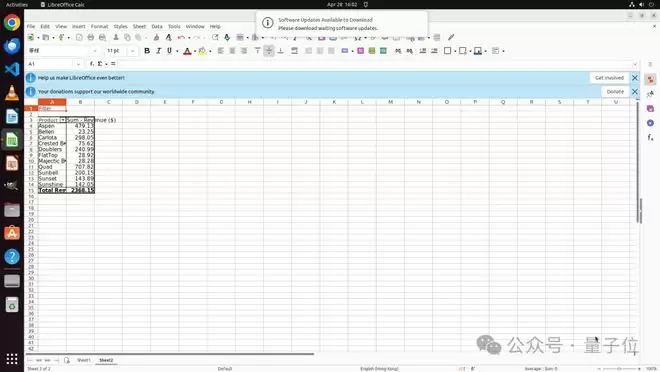
这个案例展示的不是工具永远比GUI好,而是:当任务核心是结构化表格操作时,Tool可以绕过脆弱的逐步GUI导航,用更确定的方式完成任务。
案例二:VS Code任务。任务是将/home/user/data1和/home/user/data2两个文件夹加入当前workspace。ToolCUA先连续调用add_folder工具,把两个目录加入VS Code workspace。这一步非常适合工具调用,因为路径明确、操作结构化、目标可验证。
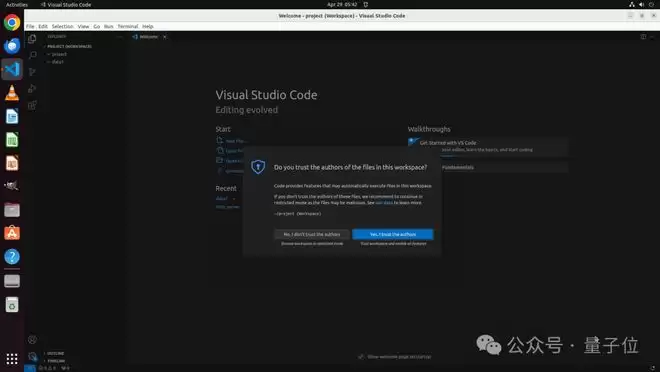
但工具调用完成后,VS Code弹出了“Do you trust the authors?”的信任确认对话框。这个状态不是简单tool call就能闭环的。此时ToolCUA切换回GUI action,点击“Yes, I trust the authors”。
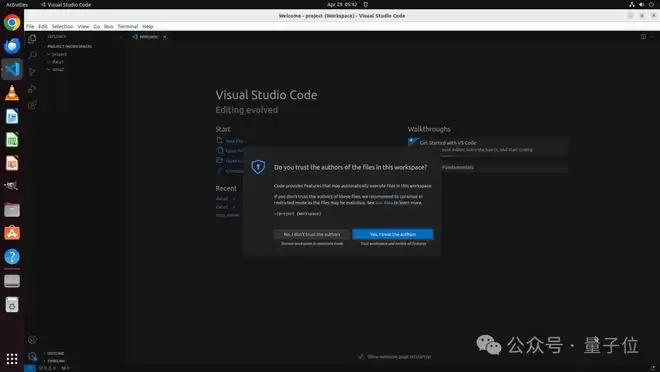
完成界面上的最后一步。
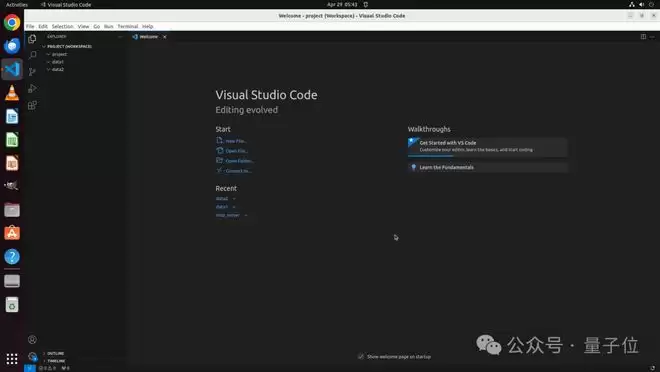
这正是ToolCUA想解决的问题:它不是试图用Tool替代所有GUI,也不是退回纯GUI操作,而是在真实环境里学习两种action space的协同与切换。
Hybrid action training,下一代CUA训练范式
在agent热潮的推动下,computer use agent正在更积极地探索真实世界里的落地路径。ToolCUA为社区揭示了一个关键现象:一旦进入hybrid action space,现有CUA和部分强基座模型会出现明显的路径困惑,甚至导致准确率下降。团队通过staged training paradigm在hybrid action training上做了一次有益探索,并验证了这一路线的有效性。
接下来,更值得继续和推进的方向,是构建更大规模的CUA工具,训练更大规模的CUA基座模型,让CUA原生具有hybrid actions的能力,更好地解决人类复杂问题。
项目:https://x-plug.github.io/ToolCUA/
代码仓库:https://github.com/X-PLUG/ToolCUA
模型地址:https://huggingface.co/mPLUG/ToolCUA-8B
Mobile-Agent系列:https://github.com/X-PLUG/MobileAgent
你是一名 AI 行业编辑,请围绕下面这条热点输出一份资讯解读:
热点:Agent不会自主选择工具?别只加工具不训练要求:
1. 先用一句话解释这条热点在讲什么
2. 再总结它为什么重要
3. 说明会影响哪些 AI 产品或内容方向
4. 最后给出 3 个适合资讯站使用的标题
游乐网为非赢利性网站,所展示的游戏/软件/文章内容均来自于互联网或第三方用户上传分享,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系youleyoucom@outlook.com。
 相关热点
相关热点通义灵码知识库通过引入企业内部专业文档,提升模型对私域知识的理解与回答准确性。构建高质量知识库需注意文档格式、命名、结构及内容规范,避免冗余信息;同时设计清晰的权限体系,确保数据隔离与安全可控,从而充分发挥AI在企业场景中的效能。
尤瓦尔·赫拉利指出人类易陷入乌托邦幻想,AI发展兼具机遇与风险。市场力量将平衡技术演进中的问题,既惩罚盲目逐利,也奖励真正创新,无需追求完美方案即可行动。
对话系统的意图澄清包括五种方法:多轮语义追问、角色-任务双锚定触发澄清、关键词强制锚定与参数回填、YAML规则驱动的条件化追问配置,以及多模态输入辅助语义补全,有效应对用户表述模糊场景。
通过结构化指令与人工校验双路径,将年龄段、安全规范、互动形式等教育属性嵌入提示词,并用英文负向词封堵常见遗漏。生成后立即执行三秒视觉扫描法,检查阶段标签、文字清晰度与互动锚点,确保封面完整合规。
- 日榜
- 周榜
- 月榜
热点快看