




特斯拉公开灵巧手专利:技术收敛,共识已至

灵巧手终于迎来自己的「VLA」范式,走到了共识时刻
回顾过去几年的具身智能浪潮,灵巧手赛道堪称最热闹也最割裂的“修罗场”。从直驱、绳驱到气压驱动和混合方案,全球的科研机构与产业玩家们拿出了十八般武艺,在自由度、抓取精度、响应速度这些实验室指标上卷到了极致,一度呈现出“家家有绝活,户户有方案”的百花齐放局面。
免费影视、动漫、音乐、游戏、小说资源长期稳定更新! 👉 点此立即查看 👈
然而,热闹背后存在一个普遍困境:几乎所有的技术方案,都困在“性能、成本、可靠性、量产性”这个不可能三角里,难以找到完美的平衡点。即便少数方案能在实验室里交出满分答卷,一旦进入工业流水线或家庭等真实复杂场景,往往会在腱绳磨损、关节串扰、长期精度漂移等现实问题上接连“翻车”。
就在行业于路线迷雾中反复摸索之际,特斯拉近日集中公开的5篇Optimus V3灵巧手核心专利,直接击穿了困扰行业多年的核心痛点。作为全球具身智能领域公认的技术风向标,特斯拉这次没有拿出又一个炫技的实验室原型,而是提供了一套完整的解决方案——通过高度仿生的底层结构设计,打造出了一双真正平衡了所有落地难点、兼顾灵巧与可靠操作的“手”。
这套方案的出现,标志着一个关键转折:灵巧手技术终于结束了“野蛮探索期”,迎来了真正意义上的技术共识与路线收敛。正如VLA架构为具身智能奠定了基座模型范式,特斯拉的方案没有为行业增添一条新的内卷赛道,而是为持续多年的路线之争画上了句号。或许,人形机器人的落地进程,将随着这双“能真正干活的手”,正式从技术验证期迈入规模化落地的新阶段。
特斯拉究竟在造什么样的手?
拆解特斯拉这次公开的五项核心专利,可以清晰地看到:它并未在现有技术路线上做修补补的优化,而是从仿生学的底层逻辑出发,完成了对灵巧手三大核心模块的彻底重构——绳驱架构的底层革新、臂手一体的结构突破,以及执行器系统的极致工程化。
首先来看绳驱架构。腱绳驱动本身并非新技术,它甚至是灵巧手领域最“经典”也最内卷的路线之一。但特斯拉的关键突破在于,它从底层重构了传动逻辑,巧妙地规避了传统绳驱中“冗余张紧”的顽疾。其布线方式并非简单地穿过关节中心轴,而是以特定角度和距离绕过关节的枢轴点。这种非中心布线,配合“横竖双向”的分层走线设计,使得每一根腱绳的拉力传递完全独立,并能实现可变的力臂。简单来说,当手指轻触物体时,力臂短、力矩小,手指触感柔软;当需要抓握时,力臂变长、力矩增大,手指便能稳健收紧。这种设计让抓握动作有了自然的过渡与自适应能力。
如果说绳驱革新解决了“怎么动”的问题,那么臂手一体的结构突破,则回答了“怎么造”的方向。特斯拉的方案选择向人类手臂的生物逻辑回归,复刻了人手“肌肉在前臂,肌腱连手掌”的进化智慧。它将动力源全部移置前臂腔体,通过高强度腱绳远程牵引手掌关节,从而大幅为手部本体减重。
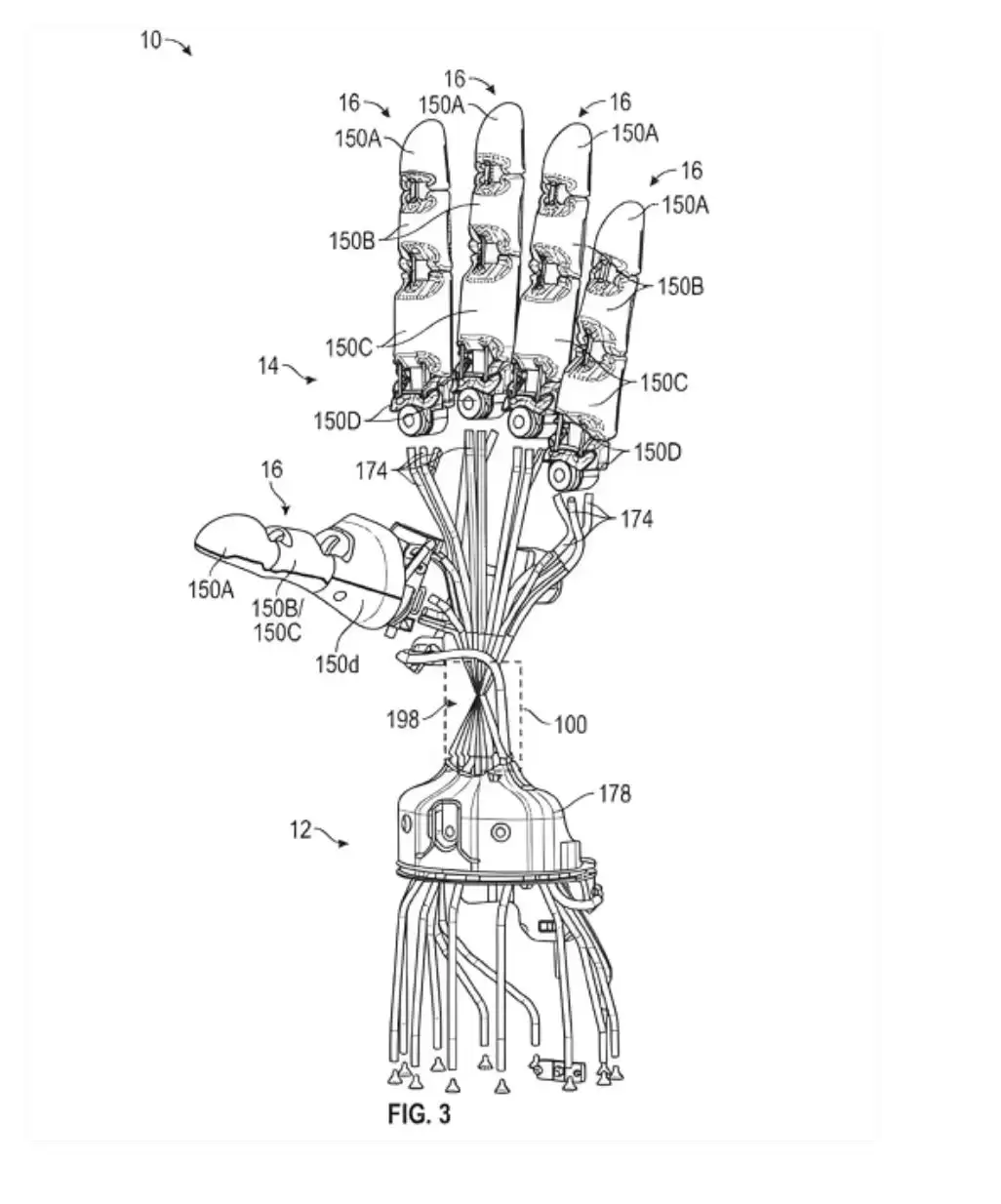
图源:特斯拉
这个看似简单的结构重构,一举打破了传统灵巧手的思维定式,同时满足了多个关键诉求:极致轻量化的手掌,解决了传统方案“头重脚轻”、给机器人手臂带来巨大负载的难题;独立的腕部自由度设计,使得机器人无需大动干戈地调动整条手臂,仅凭手腕微调即可锁定最佳作业姿态。
值得注意的是,这条技术路线并非特斯拉的“独奏”。国内的曦诺未来,早已在这条路径上完成了深度的技术验证与规模化落地,与特斯拉形成了全球范围内的技术同频共振,共同站在了灵巧手赛道的第一梯队。
作为国内少数具备电机、电控、减速器、丝杠、算法全栈自研自产能力的具身智能厂商,曦诺未来自创立之初便锚定了腱绳驱动+臂手一体的仿生路线。其于2025年初推出的Xynova Flex 1灵巧手,与特斯拉Optimus V3在技术内核上不谋而合:同样采用执行器全前置的臂手一体化架构,同样实现了25个自由度的类人动作能力。并且,通过微型电缸等核心零部件的自研创新,曦诺未来在尺寸、重量和拟人化程度上实现了进一步突破,更精准地契合了真实场景对灵巧操作的需求。

图源:曦诺未来
一西一东,两家顶尖玩家不约而同地放弃了行业内卷多年的“手掌集成式”路线,共同选择向生物本源回归,这本身就是对技术路线正确性的最强佐证。当产业的终局答案逐渐清晰,真正的先行者总会殊途同归。
特斯拉专利的第三个核心突破,在于专为臂手一体架构定制的微型执行器系统,这完成了从“能用”到“好用”的“最后一公里”跨越。在这套方案中,特斯拉采用了自研的一体化执行器设计,能在前臂有限空间内紧凑排布20个独立驱动单元,并解决了多电机密集排布带来的散热难题。同时,在手指关节处采用的混合传动架构,实现了真正的“刚柔并济”。
这一特性与曦诺未来自研的无刷空心杯电机(8mm)及行星滚柱丝杠(7mm)高度相似。曦诺未来的微型电缸是市面上推力最大、尺寸最小的产品之一,最大输出扭力达300N。更贴合实际落地诉求的是其“一体化散热壳体”设计,能让核心部件产生的热量快速、均匀地传递至整个外壳,实现高效热交换。值得一提的是,其行星滚柱丝杠达到了业内此前难以企及的精度水平。曦诺未来通过自研自产,破解了行业长期存在的生产一致性不高、成本高昂等桎梏。

图源:曦诺未来
拆解完这些专利细节,便能清晰地理解特斯拉的终极目标:它要造的从来不是一台“能抓住东西的机械装置”,而是一双真正复刻人类手臂运作逻辑、能与真实世界自然交互的仿生手。
人类的手臂与手掌,是百万年进化形成的精妙系统——肌肉群集中在前臂,通过纤细的肌腱远程操控手指,以最小能耗实现最灵活的操作。特斯拉与曦诺未来所做的,正是让灵巧手技术彻底告别纯粹的机械工程思维,回归生物进化的本源逻辑。它们要解决的终极命题,并非让机器人精准“抓住”某个特定物体,而是让机器人能像人类一样,自然而然地、无差别地与整个真实世界进行互动。
这,才是通用人形机器人真正的灵魂所在。
为什么这条路线大概率是对的?
当特斯拉的Optimus V3灵巧手方案为整个赛道按下技术收敛的确认键时,一个合理的质疑必然会出现:凭什么说这条路线就是对的?这会不会是又一次实验室里的炫技?
历史往往是最好的参照。最经典的例证莫过于特斯拉FSD(完全自动驾驶)的演进之路。最初,几乎没人相信仅靠摄像头视觉就能让车像人一样驾驶,端到端的“黑箱”架构也被认为无法满足车规级安全要求。但后来的故事众所周知,当年被视为“异类”的技术选择,最终成为了全球行业的共识。
复盘特斯拉历次技术押注,可以清晰看到其一以贯之的底层逻辑:它从不盲从行业的“约定俗成”,也不会为了短期展示效果或舆论好评而做技术妥协。它的判断标尺始终只有两个:一是从终局场景的真实需求出发,用第一性原理倒推技术路线;二是所有技术研发,最终都必须指向“规模化量产落地”,而非停留在实验室的参数内卷。FSD如此,一体化压铸如此,如今的灵巧手依然如此。

图源:特斯拉
当然,没有人是预言家,无法百分百断言这就是灵巧手的终极形态,也无法预判未来还会有多少次迭代。但可以确信的是,特斯拉这一次很可能又走在了正确的道路上。因为所有技术路线的成败,最终都要回归场景的第一性原理,接受市场的终极检验。据悉,特斯拉内部已经过多次方案“赛马”,在众多“可能性”中,最终在绳驱方案上看到了清晰的“可行性”。
人形机器人的终局,从来不是展厅里完成一两次穿针引线的展品,而是能真正走进工厂、走入家庭,替代人类完成重复、繁琐乃至危险工作的生产力工具。而这一切的核心前提,就是它必须拥有一双“像人一样的手”——具备足够的类人自由度与精细操作能力;拥有类似人类运动的惯性与操作灵活性;同时,还必须具备支撑大规模量产的成本控制能力。
特斯拉这次公开的专利,恰恰精准命中了这些场景核心诉求。它再次以其一向的思维模式,从真实需求出发,做出了关键的技术选择。就像当年FSD用纯视觉+端到端改写了自动驾驶的行业规则,这一次,特斯拉正用同样的逻辑,为灵巧手赛道书写终局的序章。
从路线共识到落地赛跑,中国玩家跑出同频加速度
然而,技术路线的正确性,仅仅是进入具身智能产业的入场券。能否将实验室里的完美方案,转化为百万级量产、全场景可用的成熟产品,才是决定赛道胜负的关键手。
特斯拉深谙此道。本次专利公开同期,内部传出明确信号:为给Optimus V3灵巧手的规模化量产铺路,特斯拉将调整原有Model S和Model X的产能规划,优先向人形机器人倾斜。这个看似“舍本逐末”的决策,恰恰印证了其一向的商业逻辑:它的目标从来不是打造一台展会原型,而是要制造能够替代人类劳动、实现百万级量产的通用生产力工具。
早已与特斯拉站在同一条技术路线上的曦诺未来,更是将“量产先行”的逻辑发挥到了极致,甚至在产业化落地的进度上,跑出了领先全球的加速度。
得益于在电机与电控领域的深厚积累,曦诺未来从第一款产品研发伊始,就将量产能力与供应链布局,提升到与技术研发同等重要的战略高度。目前,曦诺未来已经构建了从核心零部件到整机装配的全链条自产能力。它不仅拿下了国内头部人形机器人厂商的万台级订单,成为国内首个实现规模化商业闭环的灵巧手厂商,还获得了诸多头部资本的青睐。2026年,曦诺未来计划推进年产20万根微型电缸、万台灵巧手的生产线建设。
图片来源:曦诺未来
这种“技术研发与量产落地同步推进”的打法,为曦诺未来带来了双重优势。一方面,真实场景的规模化应用,形成了“越用越好用、越用越便宜”的数据与工程迭代正循环;另一方面,规模化量产带来的边际成本下降,直接击穿了商业化落地的成本门槛,将行业仍在畅想的“规模化”,变成了正在发生的现实。
站在产业演进的视角看,下一篇章的帷幕正在拉开。一双真正能像人一样交互的手,除了精准的动作执行能力,更离不开完整的“感知-分析-控制-反馈”数据闭环。而感知,正是打开这个闭环的核心钥匙。
据行业信息,曦诺未来即将发布的新一代Flex 2灵巧手,恰恰在感知系统上完成了碘伏性突破。相较于上一代,Flex 2不仅延续了臂手一体的仿生架构与极致量产能力,其核心升级在于感知系统,实现了从“盲操作”到“有感知的智能操作”的本质跨越。这意味着,搭载Flex 2的人形机器人,将能像人类一样用手“感知”世界,并根据实时场景变化自主调整动作策略,完成真正的通用化精细操作。
过去数十年,在全球高端制造与科技产业中,我们习惯了“海外巨头定义技术,国内企业跟随模仿”的剧本。但在具身智能这个全新赛道上,这样的旧故事正在被彻底改写。
这一次,我们不再是身后的追赶者,而是与全球顶尖巨头站在同一起跑线的同路人,甚至在产业化落地与场景验证的进程中,跑出了中国企业的独特优势。具身智能的赛道,从来没有天生的王者,只有始终走在正确道路上、并能将路线图变为现实的前行者。

游乐网为非赢利性网站,所展示的游戏/软件/文章内容均来自于互联网或第三方用户上传分享,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系youleyoucom@outlook.com。
 同类文章
同类文章

四维图新全栈量产方案及具身智能亮相2026北京车展
网易汽车4月24日报道 当智能网联汽车的竞争进入“决赛圈”,行业的主线已然清晰:国车加速出海,舱驾智能化快速渗透。在这个关键节点,2026(第十九届)北京国际汽车展览会上,四维图新以“智见新境”为主题,在首都国际会展中心A3馆展示了其AI驱动的全栈汽车智能化量产方案,并首次发布了其在具身智能新赛道的

英特尔称PC游戏性能差距主因软件优化不足,非硬件短板
英特尔称PC游戏性能差距主因软件优化不足,非硬件短板 四月底,英特尔副总裁罗伯特·霍尔洛克在一次访谈中,把PC游戏性能的话题摆上了台面。他的核心观点很明确:当前英特尔处理器在游戏场景下与竞品的表现差异,问题主要出在软件适配和优化这个环节,硬件设计本身并非短板。换句话说,潜力是有的,只是还没被完全“唤

Agent智能体
智能体(Agent):不只是个概念,更是AI落地的核心角色 一提起“智能体”,这个词听起来可能有点抽象。但简单来说,它代表了人工智能领域里那些能“独立完成任务”的实体。无论是一个软件程序,一个硬件设备,还是一个软硬结合的系统,只要它具备自主感知、决策和行动的能力,以达成某个目标,那它就是一个智能体。

信息自动提取
信息自动提取:如何让数据自己“跑”起来 信息自动提取这回事,说直白点,就是让机器充当我们的“信息捕手”,自动从五花八门的数据源里,精准地抓取和捞出我们需要的内容。这个过程,能够最大程度地绕开繁琐的人工操作,在提升信息获取效率的同时,也让准确性得到了保障。 关键技术工具包 想把这事儿做成,通常得结合几

淘店批量复制店铺宝贝
淘店批量复制店铺宝贝操作指南 对于淘宝店主来说,批量复制店铺宝贝是个相当实用的功能,能大幅提升上架和管理效率。它允许你将一个店铺里的多个商品信息,快速搬运到另一个店铺里。不过,操作有门道,细节得留意。下面就把具体的步骤和需要注意的地方梳理一下。 具体怎么操作? 首先,你得登录淘宝卖家后台,进入店铺管








- 日榜
- 周榜
- 月榜
 1
1
 2
2
 3
3
 4
5
6
7
8
9
10
1
2
3
4
5
6
7
8
9
10
相关攻略
4
5
6
7
8
9
10
1
2
3
4
5
6
7
8
9
10
相关攻略
 2015-03-10 11:25
2015-03-10 11:05
2021-08-04 13:30
2015-03-10 11:22
2015-03-10 12:39
2022-05-16 18:57
2025-05-23 13:43
2025-05-23 14:01
热门教程
2015-03-10 11:25
2015-03-10 11:05
2021-08-04 13:30
2015-03-10 11:22
2015-03-10 12:39
2022-05-16 18:57
2025-05-23 13:43
2025-05-23 14:01
热门教程
- 游戏攻略
- 安卓教程
- 苹果教程
- 电脑教程































 热门话题
热门话题
